Avionica/Avionics
(Some cool stuff inside...)
Novità e aggiornamenti (dal 1.9.2020): Ferranti Ground Position Indicator Mk.4, VOR/ILS receiver Collins 51RV-5, Marconi ADF Receiver AD.7092D, Standard Radio Localizer/Marker Receiver SR 14C, Global Wulfsberg GNS-X Receiver Processor, Ferranti Projected Map Display, Marconi Air navigation frequency tracker, Bendix VLF/Omega receiver computer, Litton LTN-211 VLF/Omega receiver processor, Sperry Landing and Rollout Control Unit (LRCU), GEC AFDS computer (for Panavia Tornado), BAE Advanced Radar Data Processor, Honeywell Digital Flight Guidance Computer, Sperry/Honeywell Advanced Flight Management Computer, Rockwell/Collins Flight Control Computer FCC-702, Sperry/RCA Data Nav DNP-1002, Sperry/Honeywell NZ-820 navigation computer, Honeywell NZ-2000 navigation computer, Garrett Airesearch Trust Management Computer, Projected Map Display (PMD) Elliott Bros., DECCA receiver 990-AB/2, Sperry Flight Director Computer Mk. 7, Honeywell Symbol Generator, Honeywell SG-805, IFF Signal Processor Unit SELEX S&AS, Rockwell/Collins Central Maintenance Computer CMC-7000, Honeywell Digital Flight Guidance Computer (BAE 146)
Ferranti Projected Map Display
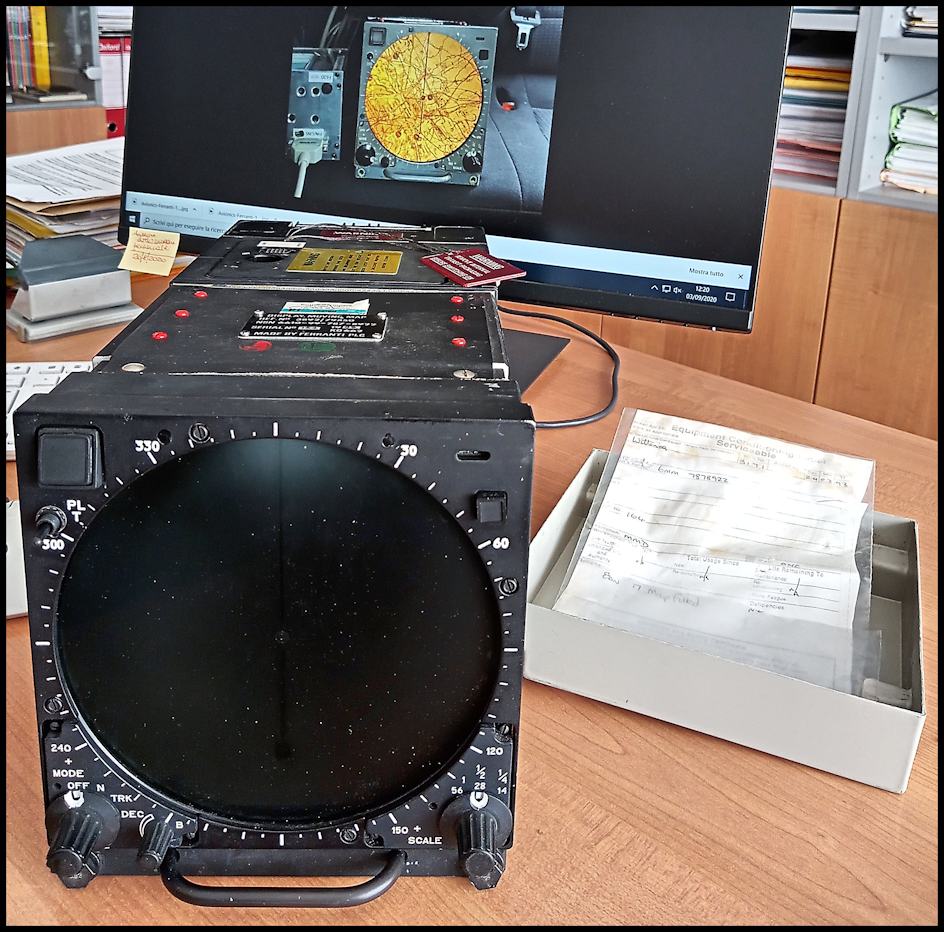
Projected-Map Display Ferranti (inizio anni Ottanta), parte del sistema di navigazione inerziale montato su diversi modelli di caccia e cacciabombardieri NATO dagli anni Settanta fino ai Novanta, ad esempio il Tornado in dotazione alla nostra Aeronautica Militare. Il modello raffigurato qui era montato su un caccia britannico SEPECAT Jaguar. Si tratta di un moving map display a retroproiezione: sullo schermo viene proiettata una mappa registrata su striscia di pellicola da diapositive a colori; una serie di input dal computer di navigazione mantengono fanno muovere la mappa in modo tale che il punto al centro dello schermo corrisponda sempre alla posizione del velivolo sulla mappa stessa. Semplice ma ingegnoso, in un'epoca in cui non esisteva ancora la possibilità tecnica di memorizzare convenientemente le mappe in modalità digitale, questo tipo di display può essere considerato in estrema sintesi il "nonno" analogico delle attuali app di Google Maps e simili che abbiamo tutti nei nostri smartphone, con l'avvertenza che qui non si tratta di tecnologia GPS (in quegli anni di là da venire) ma di semplice per quanto accurata navigazione inerziale. La precisione era dunque significativamente inferiore, nell'ordine delle delle decine o qualche centinaio di metri sul terreno, ma il sistema risultava comunque efficiente tanto da rimanere in uso per quasi trent'anni. Di questo apparato esisteva anche una versione più complessa (COMED, display a visualizzazione combinata), in cui alla mappa veniva sovrapposta (nella giusta scala) l'immagine dello schermo radar. Nei caccia Tornado il display Ferranti è stato successivamente rimpiazzato da una versione interamente digitale chiamata TARDIS.
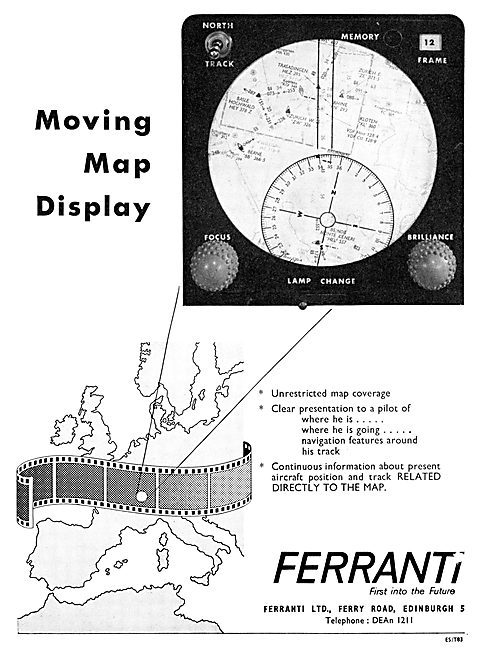
Annuncio pubblicitario della Ferranti del 1963.

Vista del retro, aperto. Sono riconoscibili la lampada alogena (al centro, le due a sinistra sono ricambi) e l'obiettivo collimatore con l'ingranaggio di messa a fuoco. In questa sezione il display Ferranti ricorda un visore portatile di diapositive a schermo traslucido.
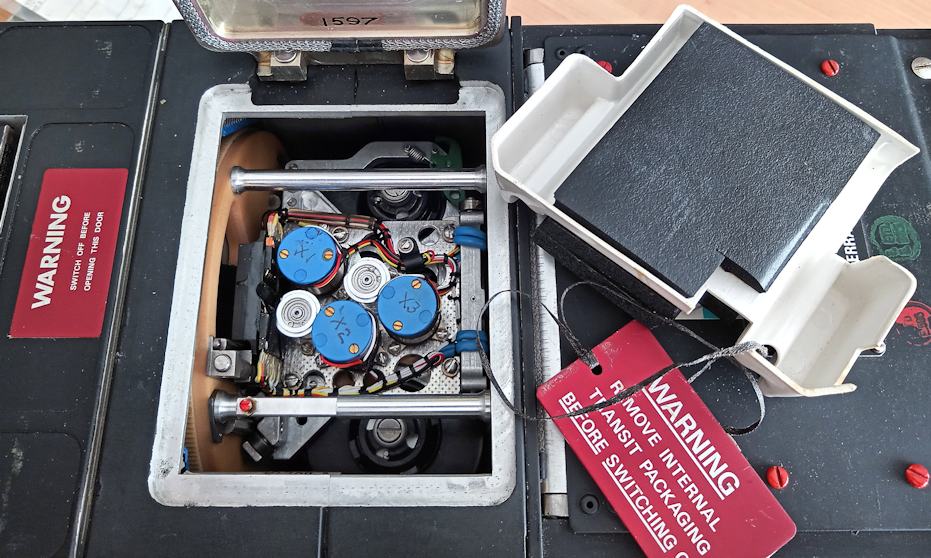
Vista dell'interno col meccanismo di movimento della mappa su pellicola.Il suo scopo è quello di mantenere al centro dello schermo il punto della mappa corrispondente alla posizione del velivolo. Anche qui tecnologia completamente analogica.
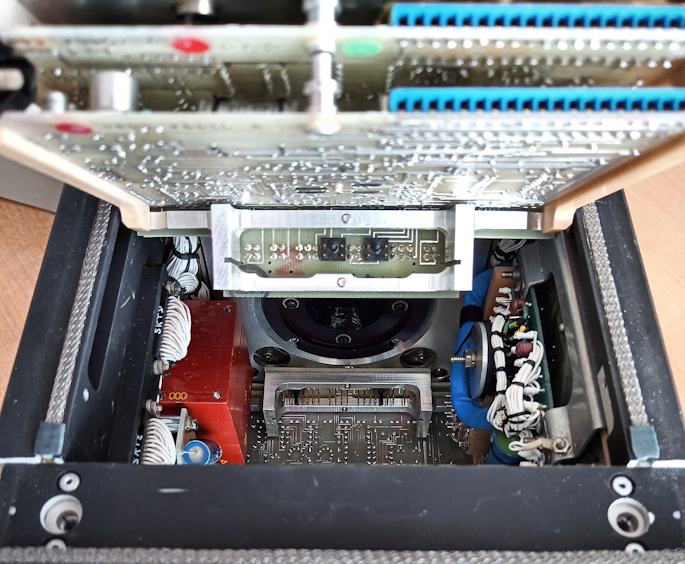
Parte anteriore aperta che mostra la lente del proiettore e parte della circuiteria interna.

Projected Map Display (PMD) prodotto dalla britannica Elliot Bros. Ltd, circa 1970, per l'impiego nel sistema di navigazione inerziale dei cacciabombardieri multiruolo anglo-francesi SEPECAT Jaguar. E' un'apparecchiatura di qualche anno più vecchia di quella riprodotta nelle foto precedenti, ma il principio di funzionamento e l'utilizzo sono i medesimi. Da questa angolatura è riconoscibile il frontale traslucido a lente Fresnel che ha lo scopo di rendere uniforme la luminosità della mappa proiettata sullo schermo. Il peso è ragguardevole, circa 11 Kg. Un oggetto identico è visibile in questa pagina: https://rochesteravionicarchives.co.uk/collection/navigation-inertial/projected-map-display. Nello stesso sito si può anche vedere un esempio di mappa registrata su pellicola 35 mm.
Ferranti Ground Position Indicator (GPI) Mk. 4
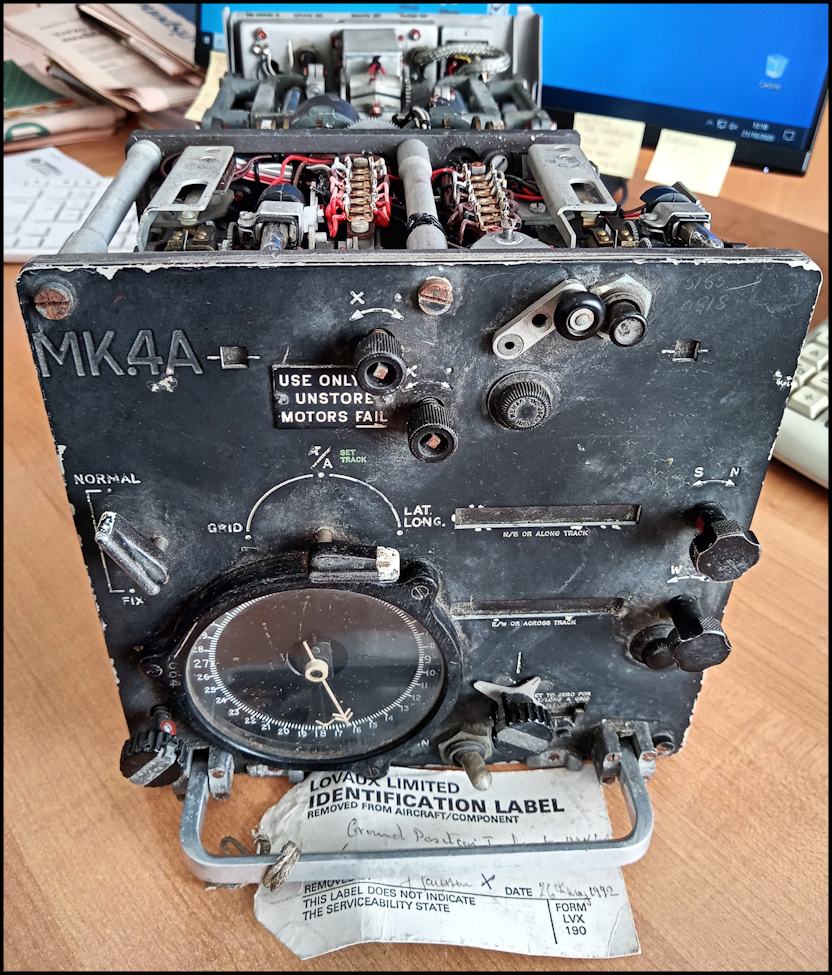
Questo oggetto è un Ground Position Indicator (abbreviato GPI, letteralmente "Indicatore di Posizione al Suolo") tipo Mk. 4 prodotto in Gran Bretagna dalla Ferranti. Faceva parte dell'apparato NBS, Navigation and Bombing System, un complesso calcolatore analogico montato su alcuni bombardieri a getto della "Classe V" (V Force) della RAF dagli anni Cinquanta fino alla metà degli Ottanta ed in alcuni casi fin dopo il 1990, in particolare sull'Avro Vulcan e sull'Handley Page Victor, nonché su altri aerei militari come l'English Electric Canberra. Lo NBS si occupava della navigazione aerea e del puntamento del bersaglio. Non si trattava di una piattaforma inerziale quanto piuttosto di un avanzato sistema di dead-reckoning elettromeccanico che accettava come input una posizione (fix) determinata dall'equipaggio e dati di velocità e direzione provenienti da varie apparecchiature, tra le quali in particolare un radar Doppler (nome in codice Green Satin) che consentiva di determinare con precisione due componenti del vettore velocità dell'aeromobile al suolo: la grandezza e l'orientamento, cioè la direzione. Il GPI è in sostanza un semplice calcolatore analogico, più precisamente un integratore continuo, che partendo da una posizione iniziale inserita dal navigatore in termini di coordinate latitudine/longitudine indicava, su una serie di quadranti, la posizione attuale del velivolo basandosi sui dati di velocità al suolo e direzione provenienti dal radar Doppler. Per quanto oggi possa sembrare rudimentale, questo metodo funzionava con sufficiente precisione sulle grandi distanze tanto da essere preferito ad altri più moderni o comunque usato assieme ad essi. La precisione, ovviamente, non è neppure paragonabile a quella di un attuale GPS. Le dimensioni del GPI Mk. 4 sono di circa 45×20×20 centimetri; il peso approssimativamente 15 Kg.
Vedi: http://www.blackmanbooks.co.uk/navigation.html (articolo sulla navigazione aerea nella RAF degli anni Cinquanta e Sessanta).
Vedi: https://www.blunham.com/Radar/SignalsMuseum/PDFs/Vulcan.pdf, https://www.radschool.org.au/magazines/Vol63/Page15.htm.
Un oggetto identico: https://collection.sciencemuseumgroup.org.uk/objects/co202252/ground-position-indicator-mk-4.
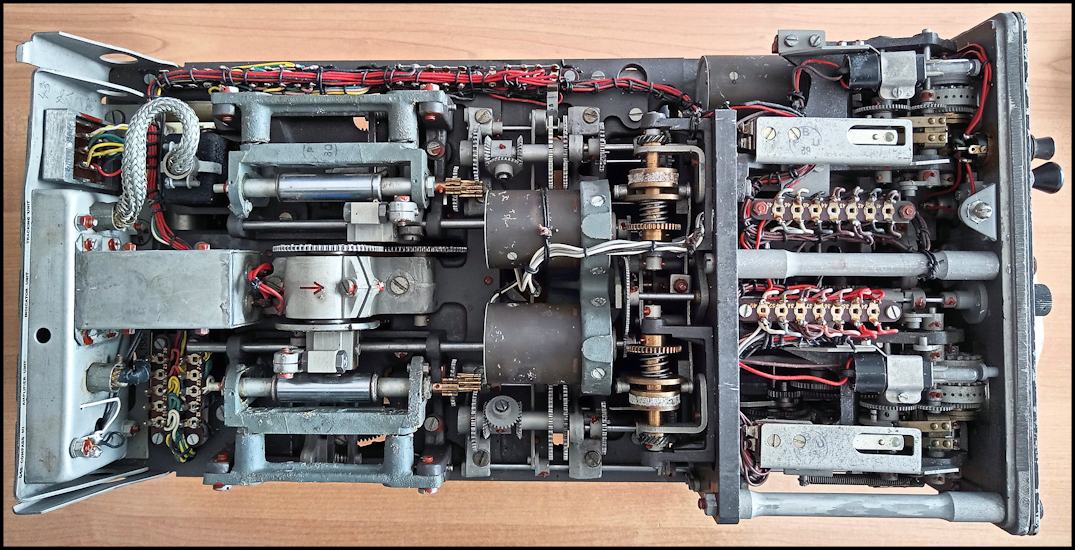
Vista dall'alto.
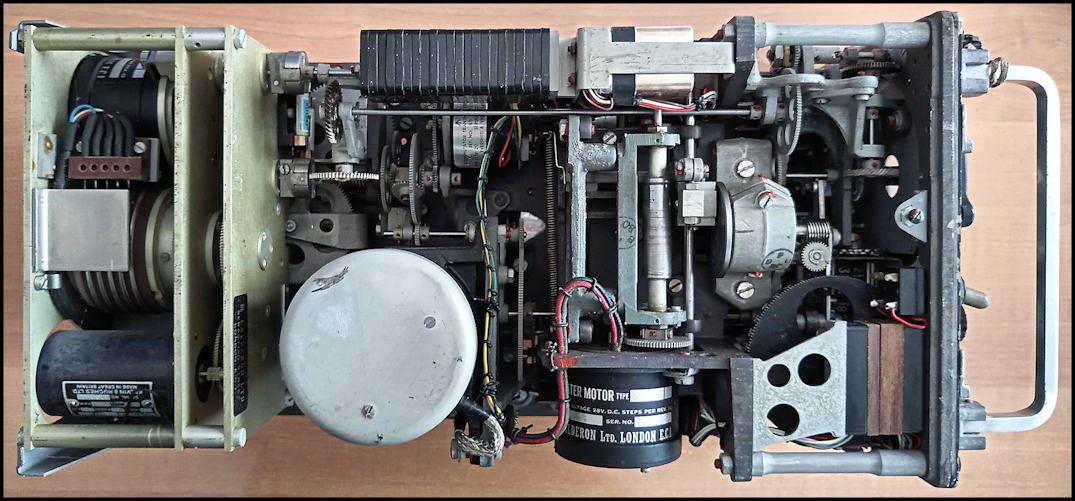
Vista inferiore.
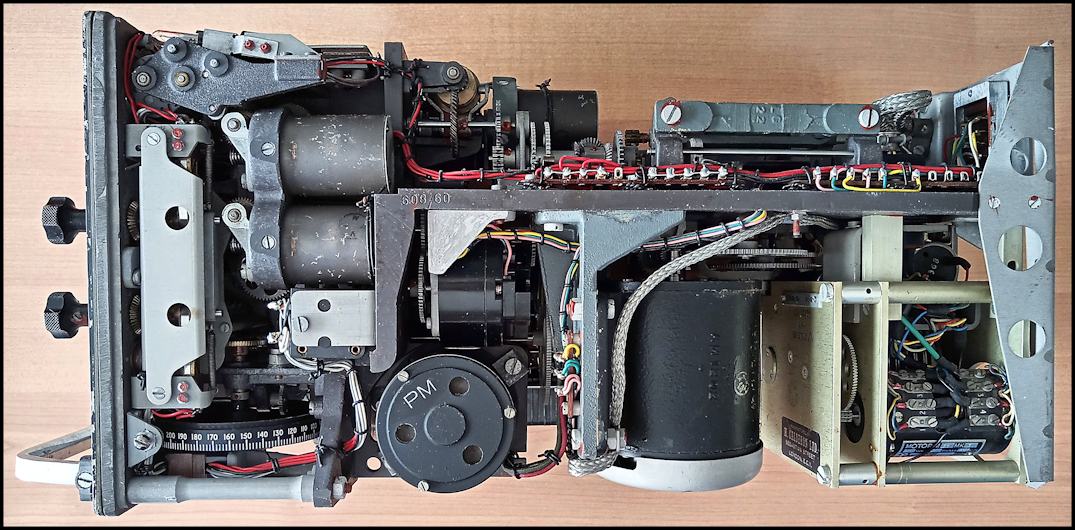
Vista dal lato destro.
Vista dal lato sinistro.

Unità localizzatrice/inseguitrice (frequency tracker) parte di un sistema di radionavigazione aerea Marconi (1970).
Vista dell'interno con i vari moduli elettronici e a destra la sezione di alimentazione.
Dettaglio dei moduli elettronici a circuito stampato tropicalizzato contenenti esclusivamente componenti discreti.
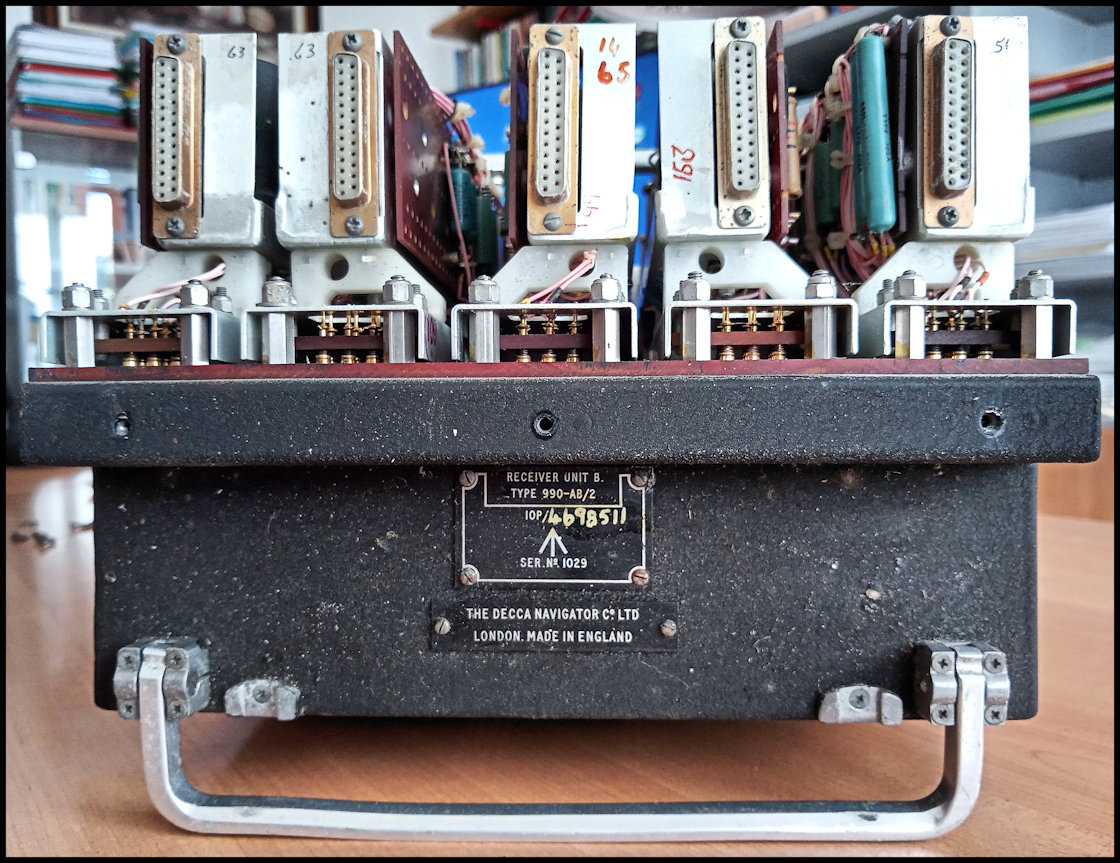
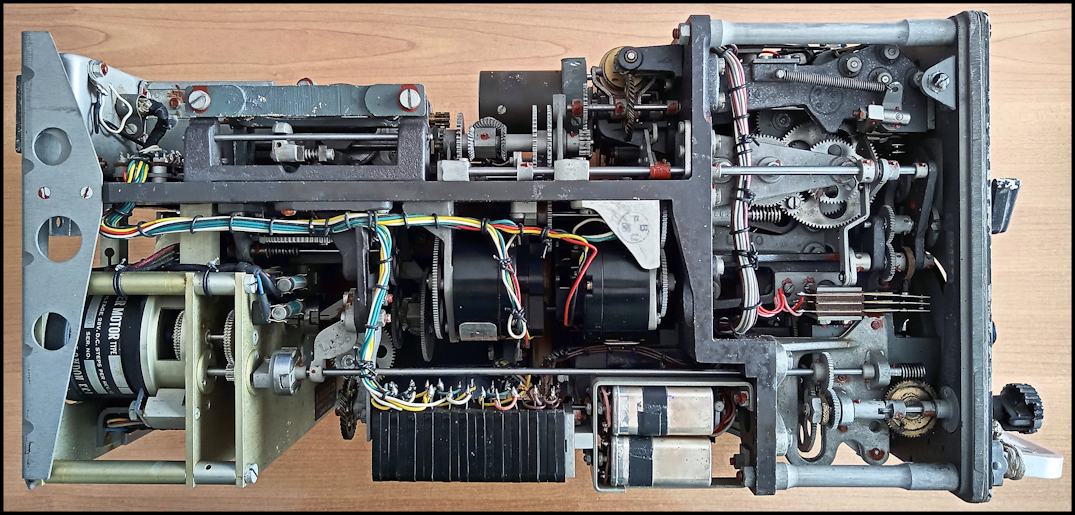
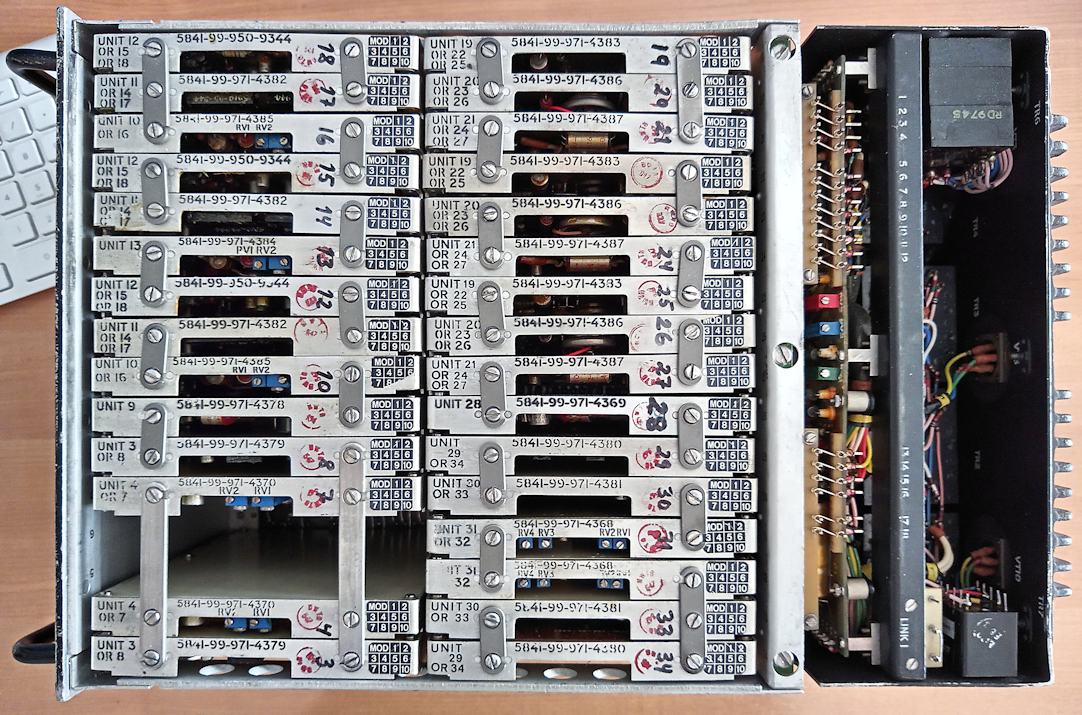
Ricevitore per radionavigazione DECCA Type 990-AB/2 (circa 1960). Il DECCA era un sistema di navigazione iperbolico utilizzato principalmente nei Paesi nordeuropei, anche se col passare degli anni si è diffuso ad altre regioni. Si basava su segnali a bassa frequenza (onde lunghe) come il concorrente LORAN ma, mentre quest'ultimo sfruttava -per la determinazione della posizione del ricevitore- la differenza di tempo tra i segnali ricevuti da più stazioni emittenti, il DECCA operava un confronto di fase tra i segnali dei trasmettitori. Le emittenti DECCA trasmettevano segnali ad onda continua, al contrario dei trasmettitori LORAN che funzionavano ad impulsi. Il DECCA aveva un grado di precisione paragonabile al LORAN (circa 200 metri contro i 180 del LORAN) ed è stato usato principalmente in mare: i ricevitori per impiego aeronautico, come questo, sono rari. La rete di trasmittenti DECCA era basata su 4 emittenti, tra cui una chiamata "master", due "slave" ed una di controllo, contrassegnate da colori convenzionali diversi (rosso, verde e viola). Gli indicatori dalla cui lettura si ricavava la posizione erano 3, uno per colore, e venivano convenzionalmente chiamati "decometri". Il sistema DECCA è stato inventato negli Stati Uniti all'inizio degli anni Quaranta, ma sviluppato e successivamente commercializzato (quando, dopo la II Guerra Mondiale, fu esteso all'impiego civile) dalla britannica Decca Records, da cui il suo nome. Costituisce da questo punto di vista una particolarità in quanto si tratta dell'unico sistema di radionavigazione globale implementato e mantenuto da un'unica compagnia. Il principio di funzionamento rendeva la costruzione dei ricevitori più semplice ed economica rispetto al LORAN; durante la guerra venne impiegato dalla Marina militare britannica durante le operazioni di sminamento delle acque del Canale della Manica in preparazione, e successivamente, allo sbarco in Normandia. Nel periodo di massima diffusione (fine anni Sessanta) comprendeva a livello mondiale circa 180 stazioni trasmittenti, concentrate perlopiù nel Mare del Nord e nel nord Atlantico, suddivise in "catene" a gruppi di 4 come più sopra brevemente descritto. Il DECCA è stato largamente impiegato dalle compagnie petrolifere operanti nel Mare del Nord, finché, a partire dagli anni Settanta. è stato progressivamente soppiantato dal più preciso LORAN-C ed in seguito dal GPS. La rete DECCA è stata infine dismessa nella primavera del 2000, dopo più di 50 anni di attività.
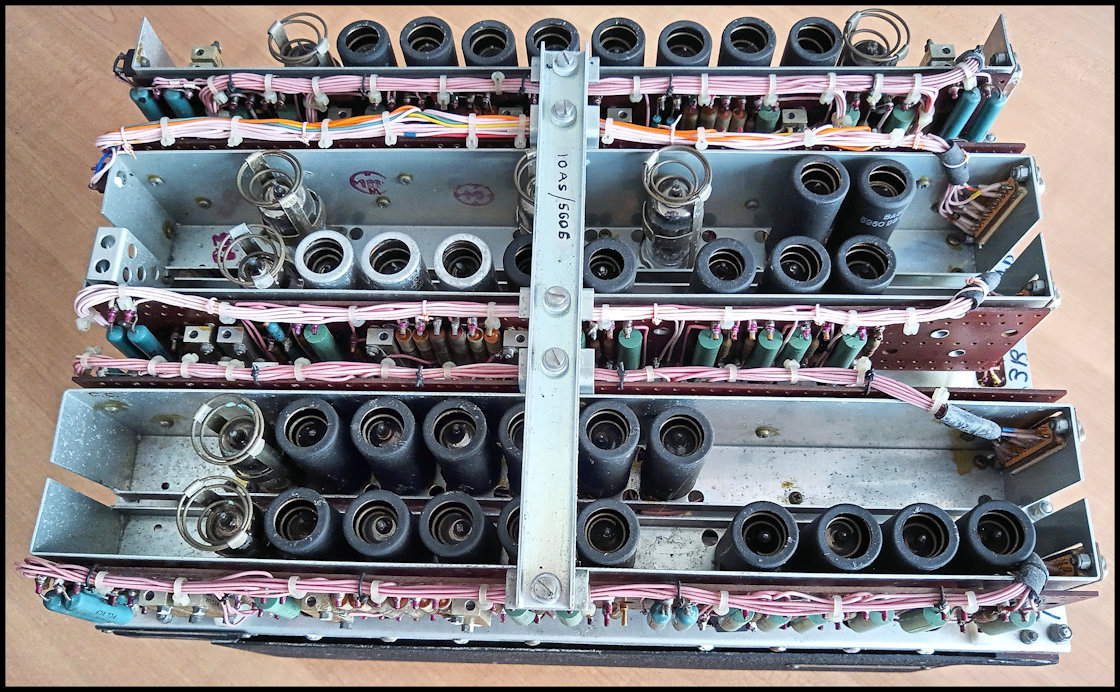
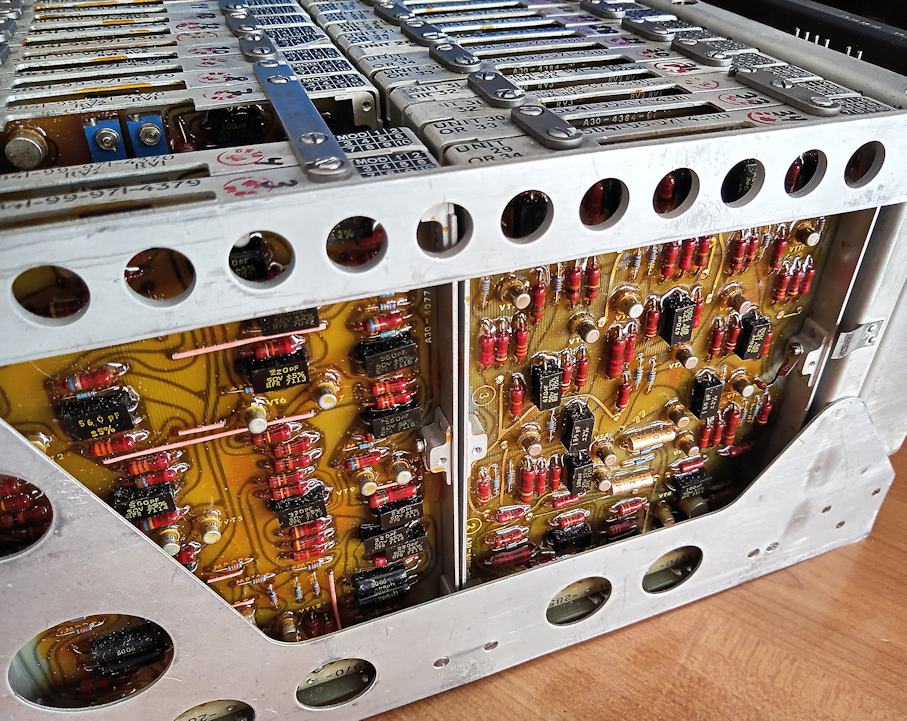
Vista dell'interno, suddiviso in moduli circuitali interamente a valvole.

Ricevitore Localizer/Marker valvolare per ILS (atterraggio strumentale) fabbricato da Standard Radio (1959), modello SR14C.
Ricevitore ADF (Direction Finder) per navigazione strumentale Marconi AD.7092D, interamente valvolare (anni Cinquanta, questo esemplare è del 1958). E' stato impiegato in alcuni dei primi aviogetti commerciali come il de Havilland Comet.

Vista dall'altro lato.

Ricevitore VOR/ILS Collins 51RV-5 (1983/4).
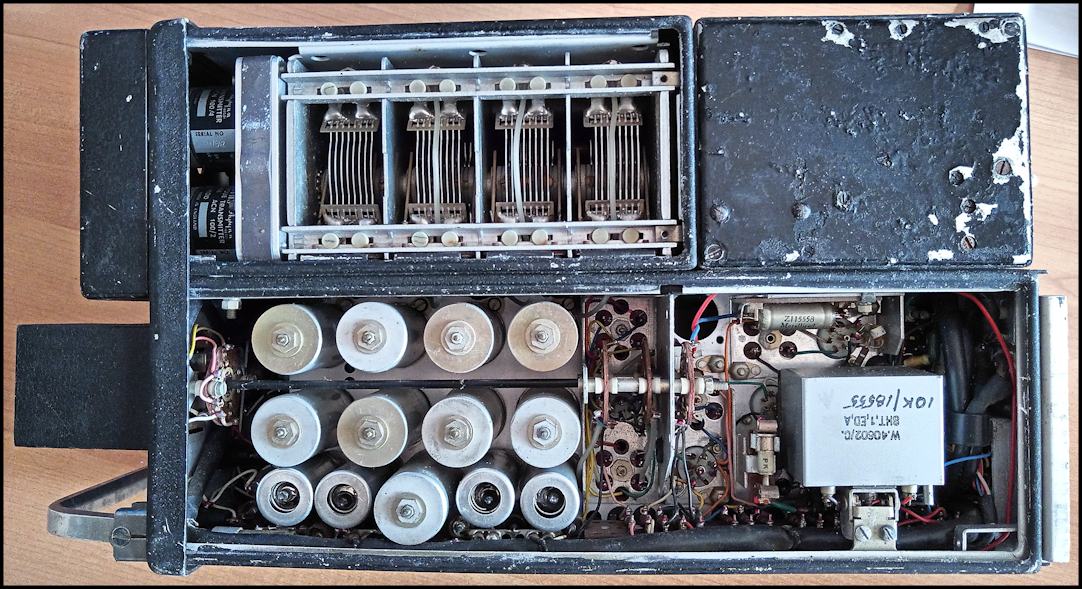
Vista interna, lato sinistro.
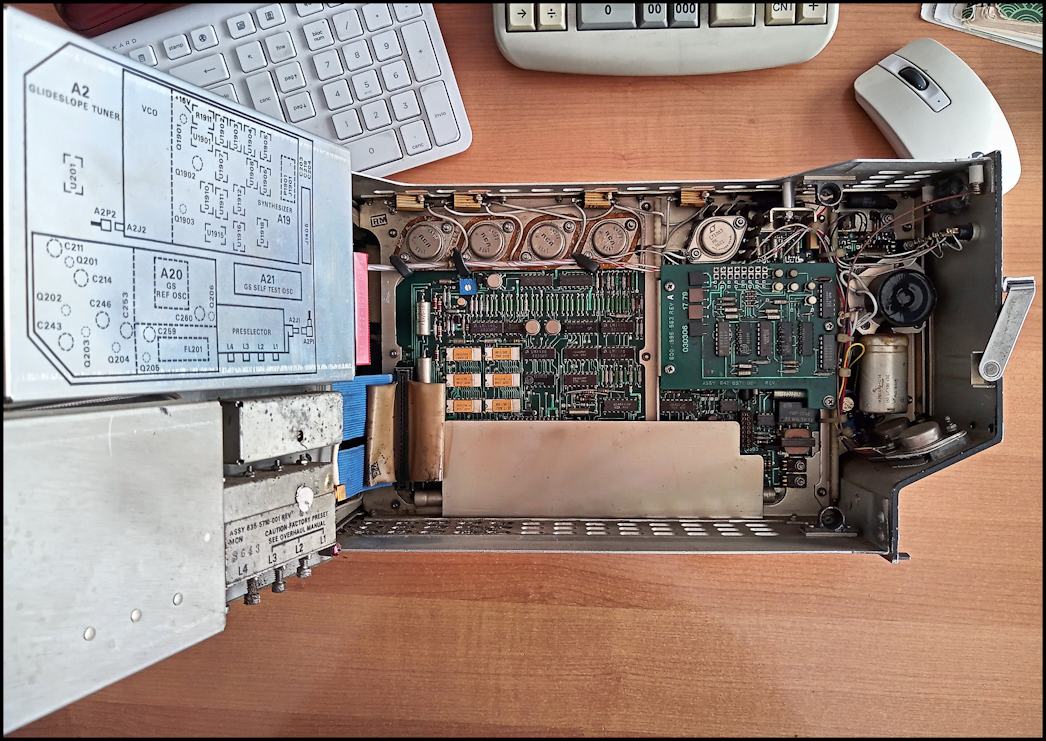
Vista interna, lato destro.

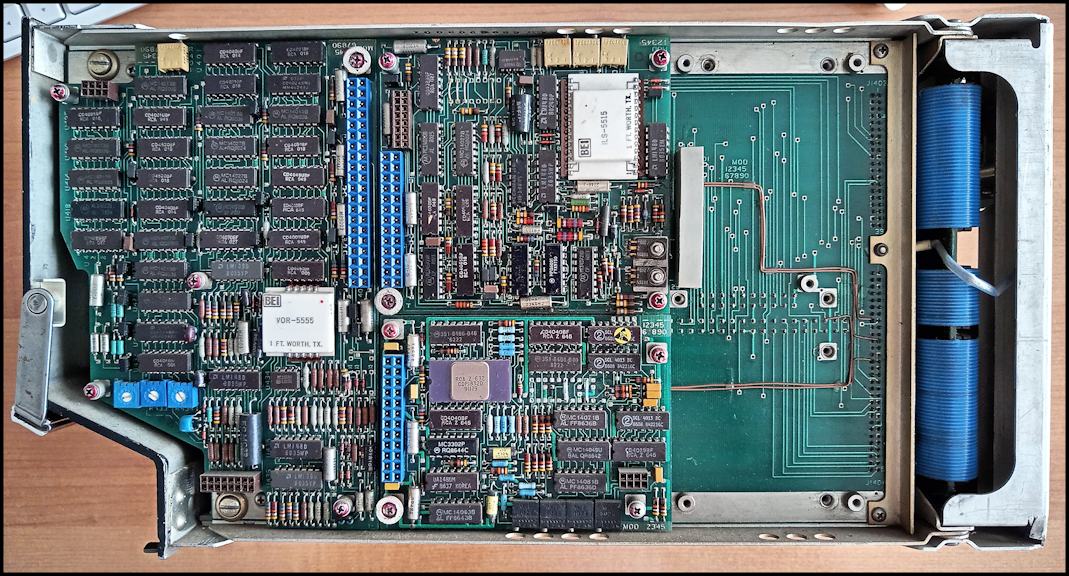
Ricevitore Omega/VLF Bendix con etichettatura TWA (1978). Omega/VLF era un sistema di radionavigazione iperbolica globale basato su trasmettitori a bassa frequenza (VLF), concepito nel 1968 per applicazioni militari ed in seguito largamente applicato all'aviazione civile, fino alla diffusione del più preciso GPS con il quale ha convissuto per un certo periodo fino al definitivo spegnimento nel 1997. Inizialmente Omega prevedeva 8 stazioni trasmittenti in banda VLF tra 10 e 14 kHz, che permetteva un'accuratezza di circa 6 km nella determinazione della posizione (ottenuta dalla comparazione di fase dei segnali ricevuti da 3 trasmettitori). Successivamente è stata aggiunta un'ulteriore stazione trasmittente e l'accuratezza è migliorata portandosi nell'ordine dei 3 km. Una caratteristica particolare dell'Omega era la notevole altezza delle torri trasmittenti, circa 400 metri. I primi ricevitori Omega/VLF erano apparecchiature completamente analogiche; nel corso degli anni Settanta e poi degli Ottanta sono stati sviluppati dei "ricevitori/elaboratori" in parte analogici ed in parte digitali che incorporavano alcune delle funzioni poi presenti nei più moderni ricevitori GPS quali tracciamento della rotta, memorizzazione di coordinate, calcolo dei tempi di navigazione ecc. Questo modello della Bendix contiene una CPU realizzata con componenti a bassa e media scala di integrazione, oltre a memorie di vario tipo. La scheda processore vera e propria, a sinistra, contiene 4 ALU TTL a 4 bit 74181. L'unità completa pesa circa 15 chilogrammi. Attenzione: l'identificazione come ricevitore Omega/VLF è basata sul titolo dell'asta online; potrebbe anche trattarsi, ma non ne sono sicuro, di un ricevitore LORAN-C per uso aeronautico.

Ricevitore Omega/VLF Litton LTN-211 con etichettatura British Airlines (1982, ultimo aggiornamento del software Agosto 1996). Si trattava di uno dei modelli più avanzati di ricevitori Omega per uso aeronautico, destinato all'impiego nei grandi jet commerciali ed in velivoli militari, avendo i requisiti di accuratezza richiesti da quest'ultima applicazione. Poteva essere impiegato singolarmente oppure accoppiato ai sistemi di navigazione inerziale Litton LTN-51 ed LTN-72.

Il cuore del ricevitore LTN-211 è rappresentato da un microprocessore Texas Instruments TMS9900.

Ricevitore Global Wulfsberg GNS-X (1988). Integra un interrogatore DME ed un ricevitore LORAN-C. Può essere collegato ad un'unità VLF/Omega opzionale oppure contenere un modulo GPS. La CPU è una Zilog Z80.

Computer analogico del pilota automatico Sperry Flight Director Mark 7 (circa 1965), impiegato in svariati modelli di jet commerciali britannici tra cui ad esempio il DeHavilland Comet.

Vista dell'interno, modulare, interamente a valvole ed amplificatori magnetici.

Landing and Rollout Control Unit (LRCU) Sperry per Boeing 747 e 737 (1979). Si tratta di un computer analogico che assiste i piloti nella fase di atterraggio. Storicamente è stato il primo dispositivo per atterraggio semiautomatico a ricevere l'approvazione per l'installazione su aeromobili commerciali.
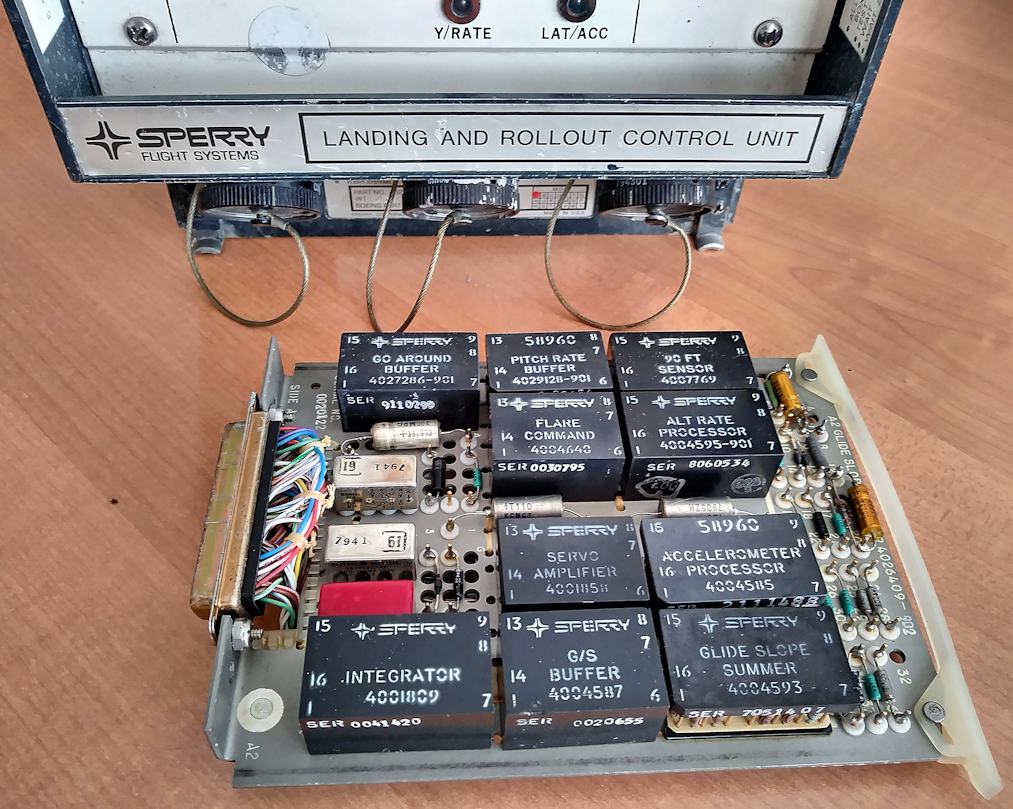
Dettaglio di una delle schede (modulo Glideslope processor). Si può notare che è realizzata con moduli circuitali ibridi di tipo "cordwood" a transistor ed integrati SSI e che non si tratta di un circuito stampato bensì di una base metallica sulla quale sono montati i moduli stessi ed altri componenti, collegati fra loro con la tecnica del wire-wrapping.
Computer AFDS (Autopilot and Flight Director System), P/N 49-134-01, realizzato da GEC Marconi e Aeritalia per la prima generazione di caccia multiruolo Panavia Tornado (GR.1, 1979). Basato sull'architettura a 12 bit del minicomputer commerciale Elliott 903 del 1965, a sua volta derivato dal modello 902 per usi militari (vedi: http://www.computermuseum.org.uk/fixed_pages/Elliott_903.html), l'AFDS era un sistema avanzato di pilotaggio automatico ed assistenza nelle manovre, collegato ad un secondo computer (analogico) detto CSAS che aveva il compito di aumentare la stabilità del velivolo. Il Tornado è stato tra i primissimi aerei militari con comandi di tipo fly-by-wire, ovvero mediato elettronicamente, ad azionamento misto digitale ed analogico. Considero questo uno degli oggetti più interessanti della mia raccolta; la costruzione è robustissima, progettata per resistere ad elevate accelerazioni sia orizzontali che verticali. L'insieme pesa circa 20 Kg. (Il contaore segna 5584.) "The AFDS, the Autopilot and Flight Director System, forms a vital part of the Tornado's avionics. These two redundant computers (Part.Nos. 49-134-01 and 49-133-01) control automatic flight of the aircraft at very low altitudes since its first flight in 1974 using input from the inertial navigator and other sources. The two redundant computers are EPROM programmed 12 bit machines based on the Elliott 900 architecture are using CMOS RAM with parity and probably will remain in service until the last Tornado will have gone out of service, which will be as late as 2020" (da http://www.programmer-electronic-control.de/).
Vedi: https://rochesteravionicarchives.co.uk/collection/flight-control/auto-pilot-flight-director-computer, http://www.programmer-electronic-control.de/.
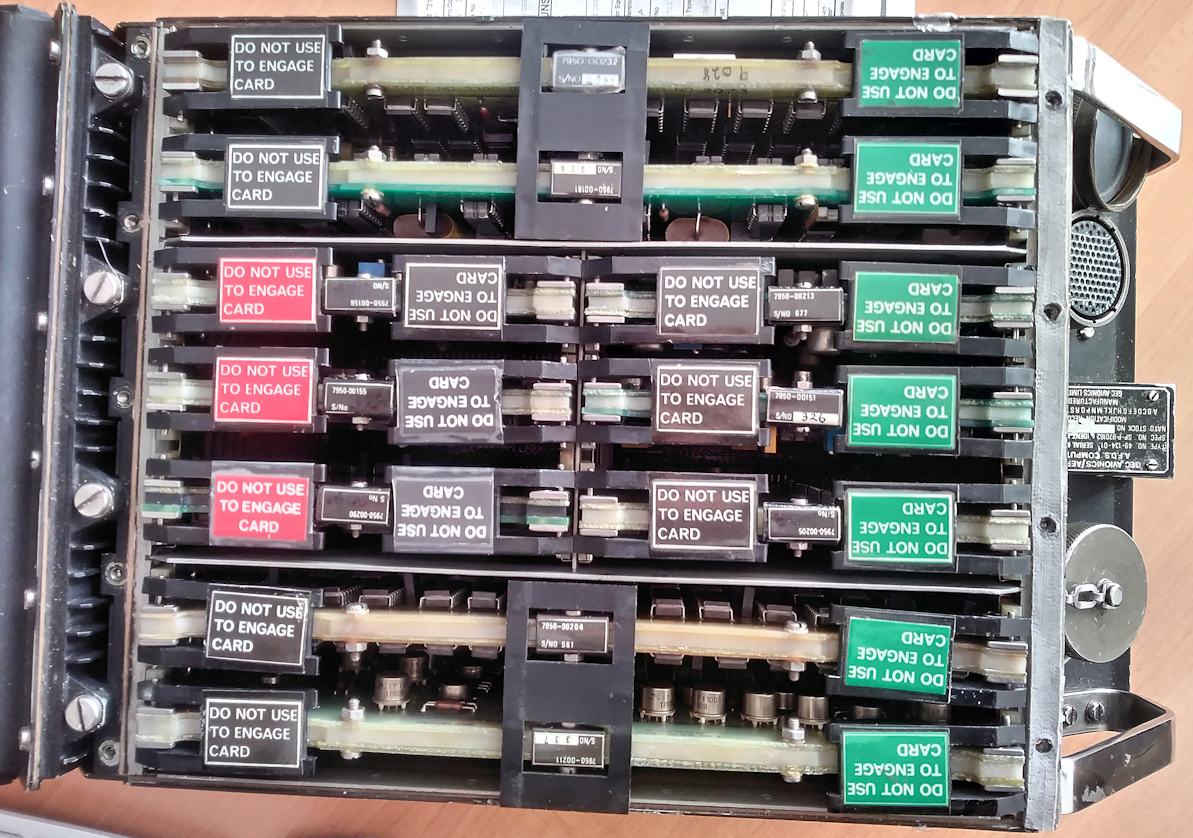
Vista superiore dell'AFDS aperto. L'elettronica è formata da componentistica TTL a bassa e media scala di integrazione (tra cui 3 ALU 74181) oltre a memorie CMOS.

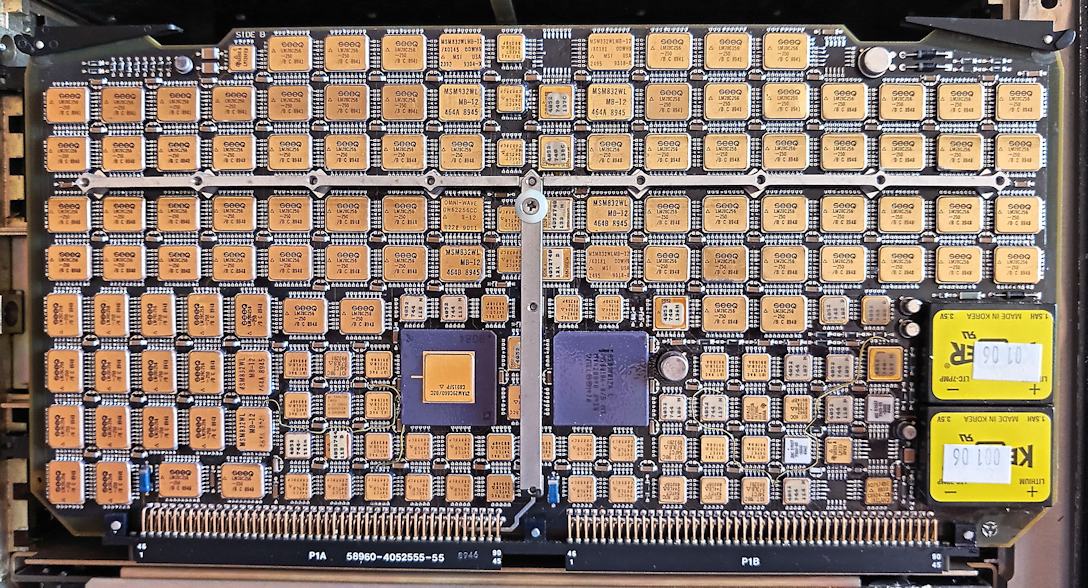
Processore di dati radar ad apertura sintetica (SAR) per elicotteri militari prodotto da BAE Systems, 1998.
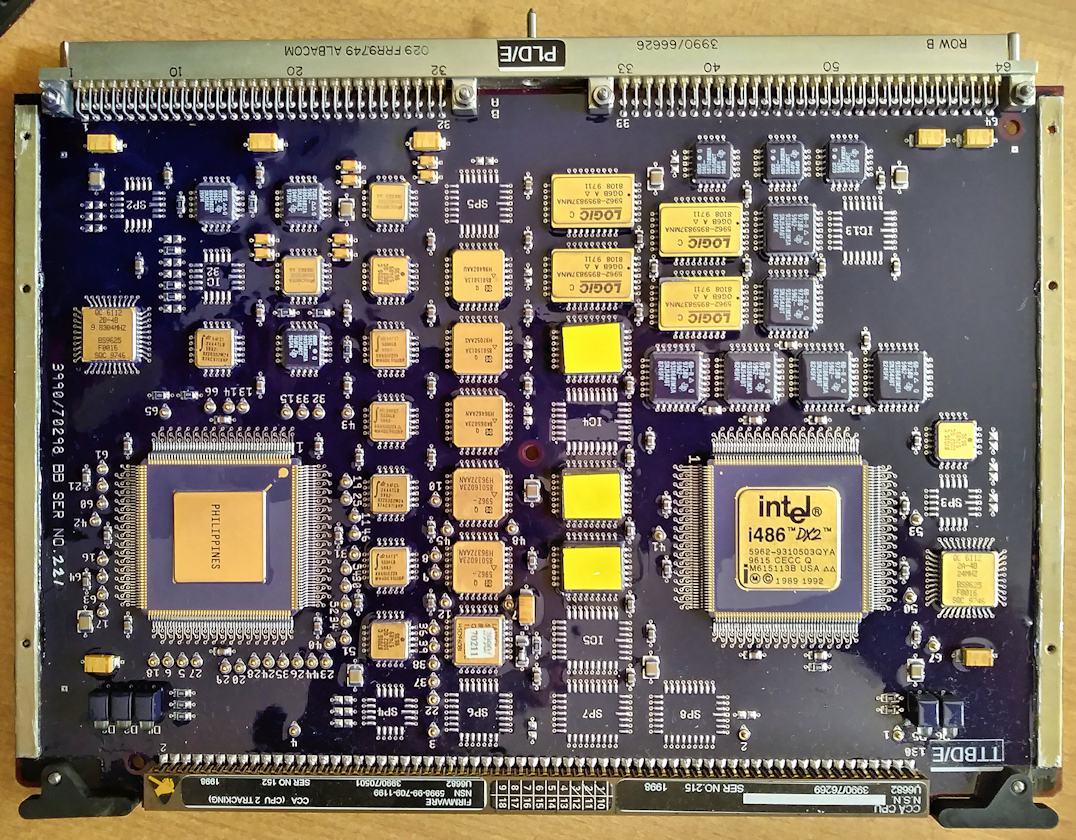
Una delle due schede CPU con processore Intel 486DX-2 a 66 MHz con specifiche militari. L'altro integrato di grandi dimensioni è un ASIC CMOS della Texas Instruments.
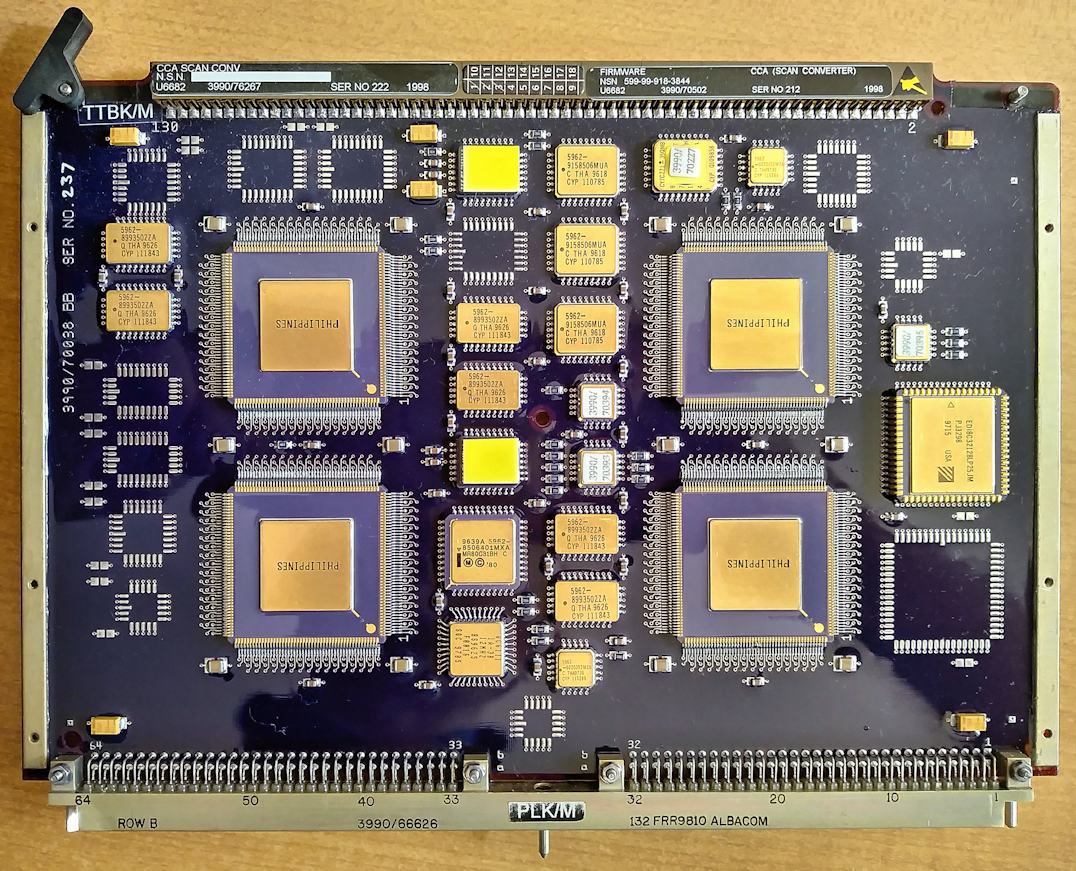
Un'altra scheda della stessa apparecchiatura (Scan Converter) con memorie ed ASIC VLSI di Texas Instruments.

Dettaglio della parte frontale.

Digital Flight Guidance Computer Honeywell per jet commerciali Boeing 737/747 e DC-9/DC-10 con etichetta American Airlines (1982).

Vista frontale.

Vista dell'interno. La CPU è formata da 4 ALU TTL a 4 bit 74181.

Advanced Flight Managent Computer Sperry/Honeywell Avionics per jet commerciali Boeing 747/767 (1985). Configurazione ridondante (fault tolerant) con doppia CPU.
L'interno, come si suol dire, "ha il suo perché": questa è una delle due schede processore, con CPU Intel 80C186 a 8 MHz.
Scheda di memoria e programma.
Scheda di interfaccia I/O con ASIC Honeywell.
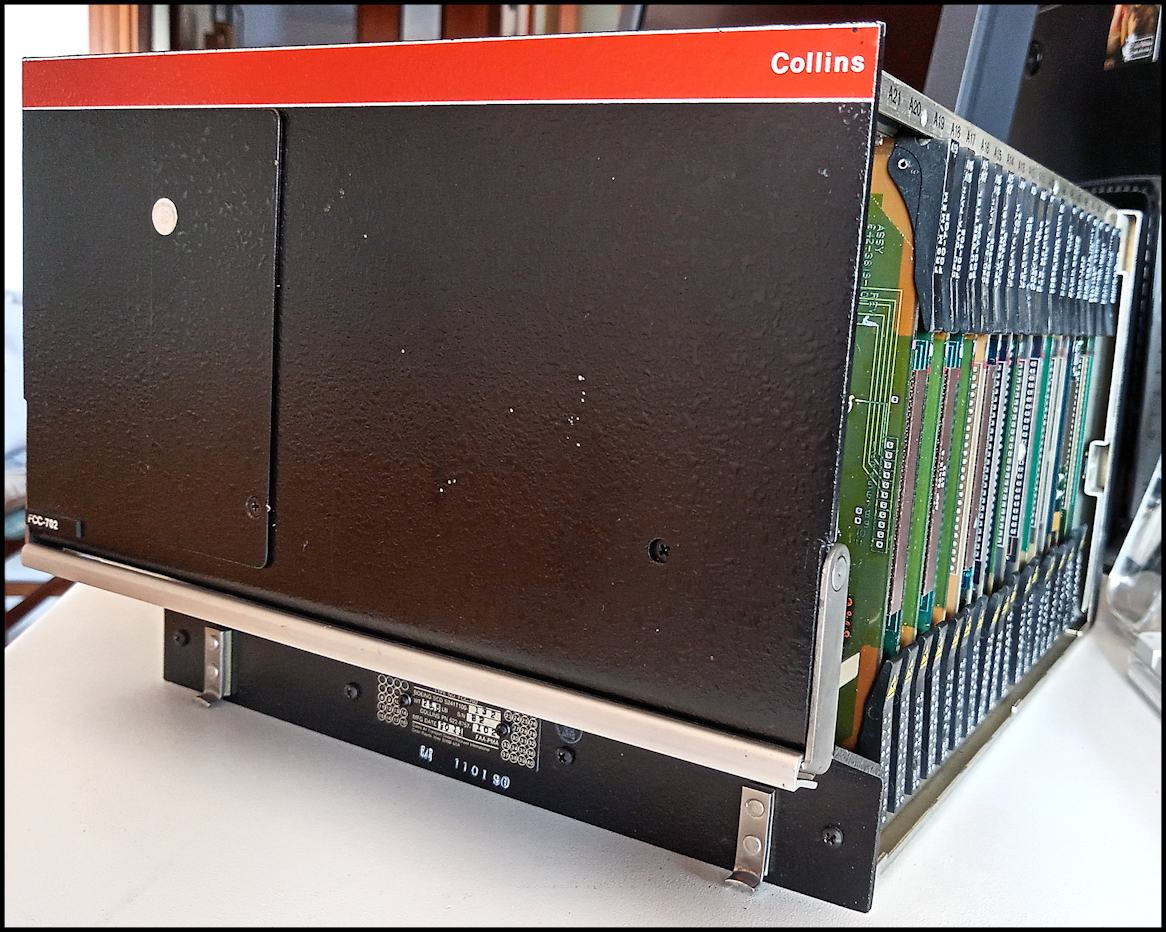
Flight Control Computer Rockwell-Collins FCC-702 (1988) con etichettatura TWA, usato ad esempio nei Boeing 767 e 757.
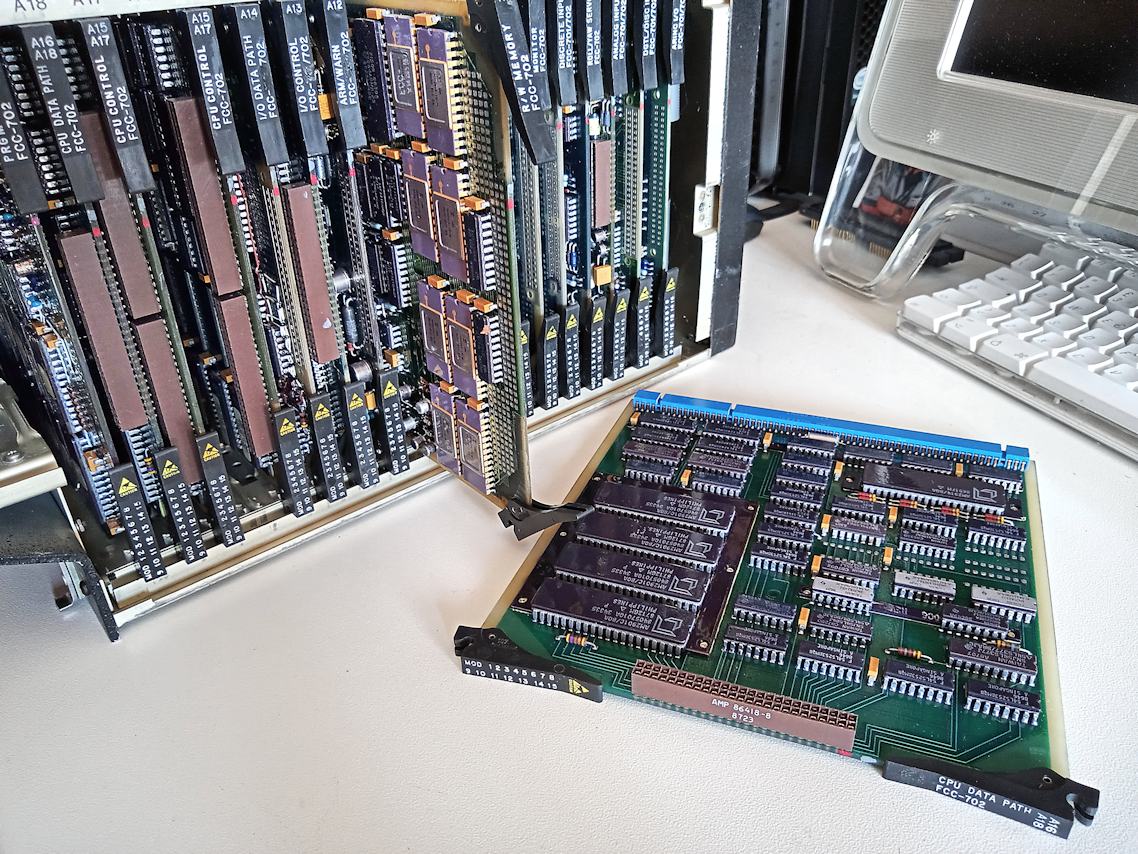
Vista dell'interno. La CPU a 16 bit, ridondante, è realizzata con bitslice a 4 bit AMD Am2901.

Digital Flight Guidance Computer fabbricato da Honeywell Avionics, circa 1994, installato su un jet commerciale BAE 146. Possiede un'architettura di sistema fault-tolerant a ridondanza completa, nella quale tutti i componenti essenziali (CPU, memoria, interfacce principali) sono duplicati.
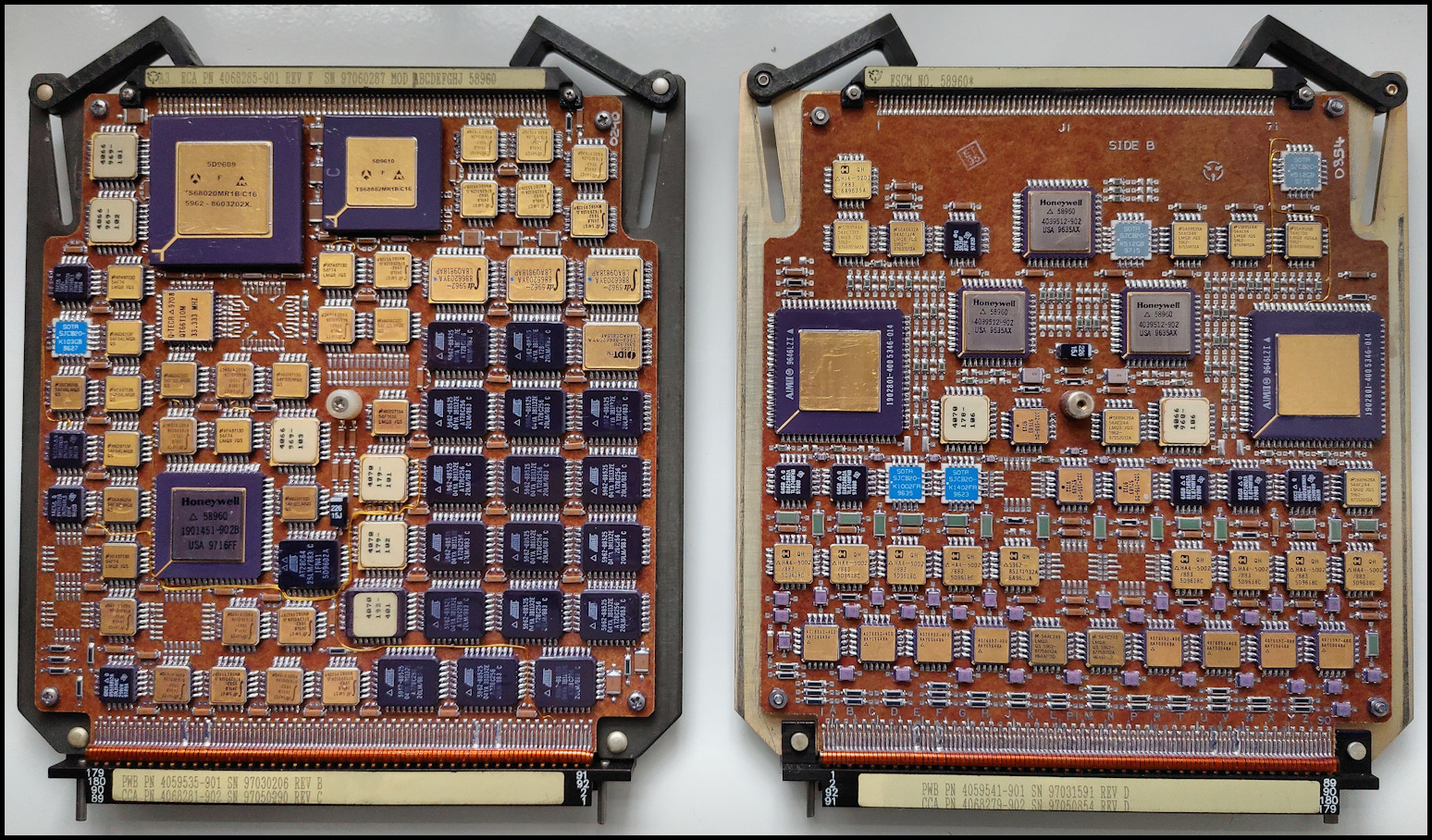
A sinistra, una delle 2 schede CPU: oltre alla memoria software EEPROM (in basso a destra) ed alla RAM (sull'altro lato), contiene un processore a 32 bit 68RC020 a 16 MHz con FPU 68881, entrambi fabbricati da Thomson. La scheda a destra è un'interfaccia di sistema e contiene ASIC VLSI di AMI e moduli multichip fabbricati dalla stessa Honeywell.

Processore del sistema di navigazione digitale per aerei commerciali Sperry/RCA Data-Nav DNP-1002 (1980).
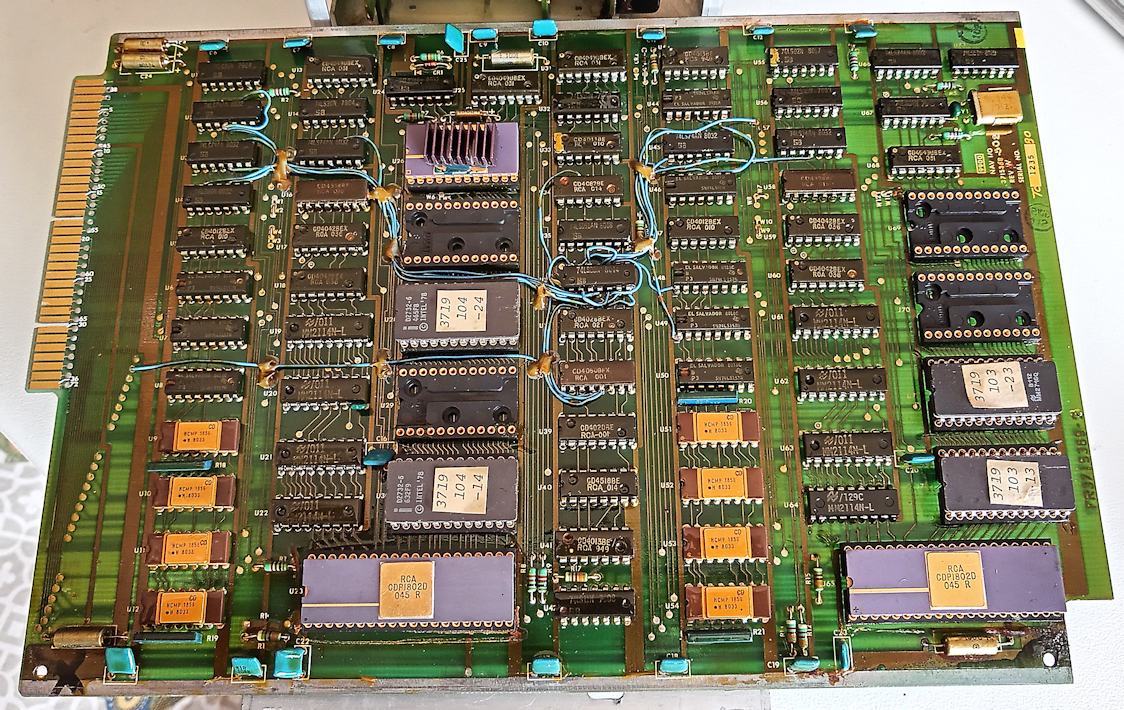
Una delle schede, con due CPU RCA 1802.
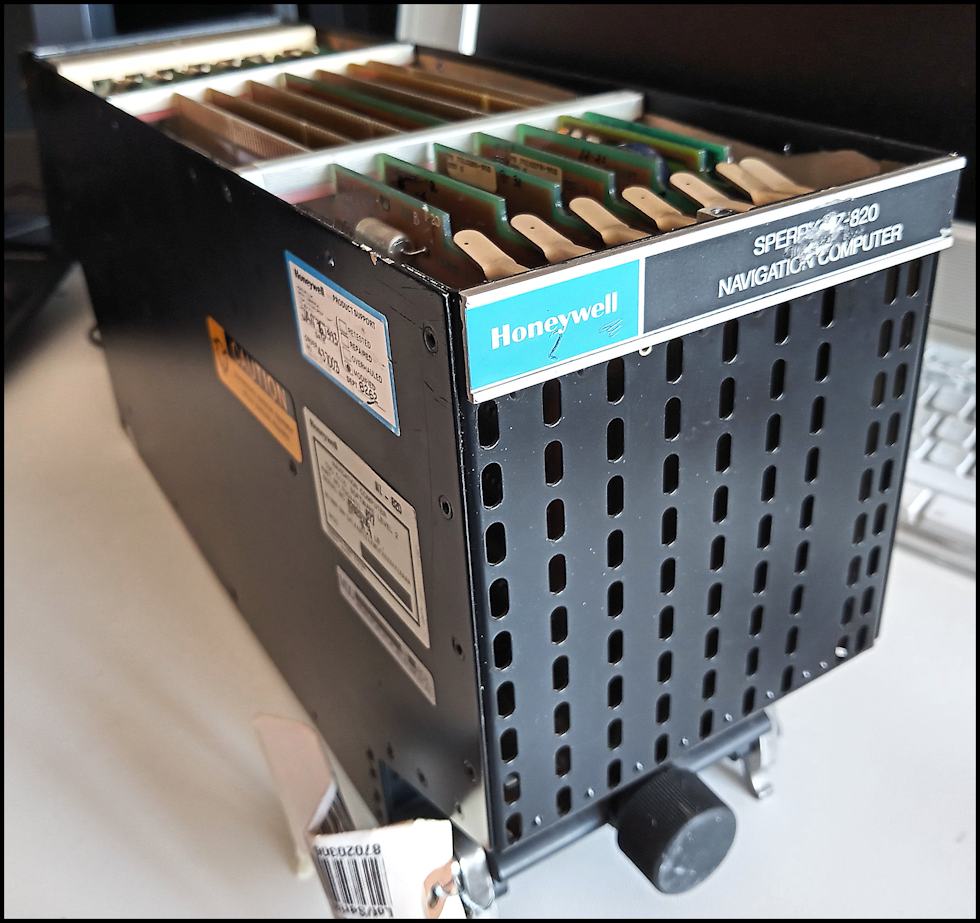
Computer di navigazione per aerei commerciali Sperry/Honeywell NZ-820 (1987).
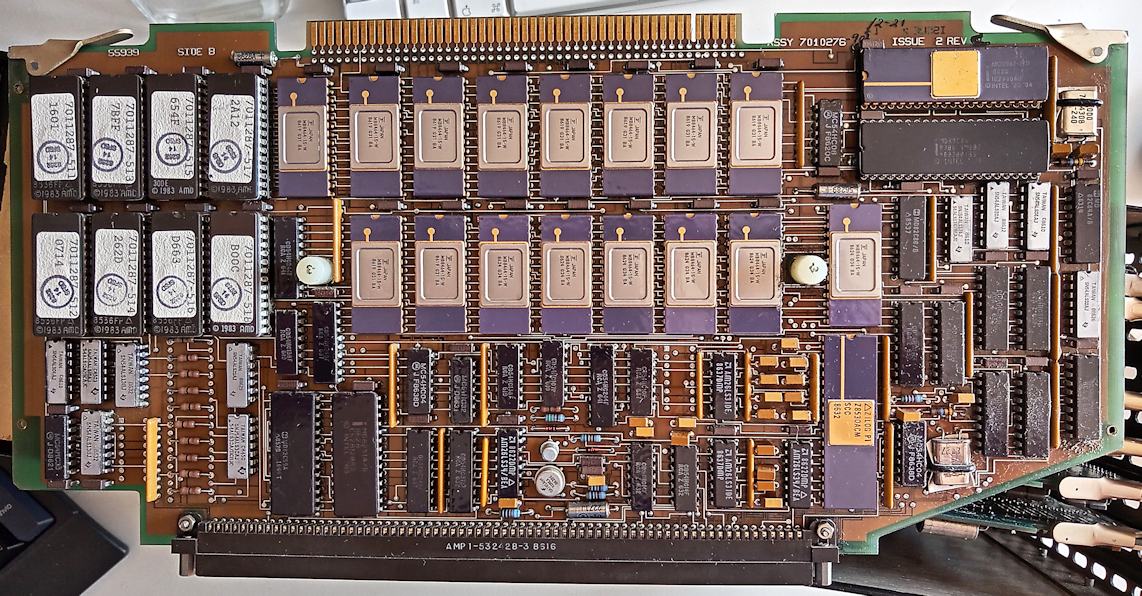
La scheda CPU, con processore Intel 8086 a 6 MHz ed FPU 8087.
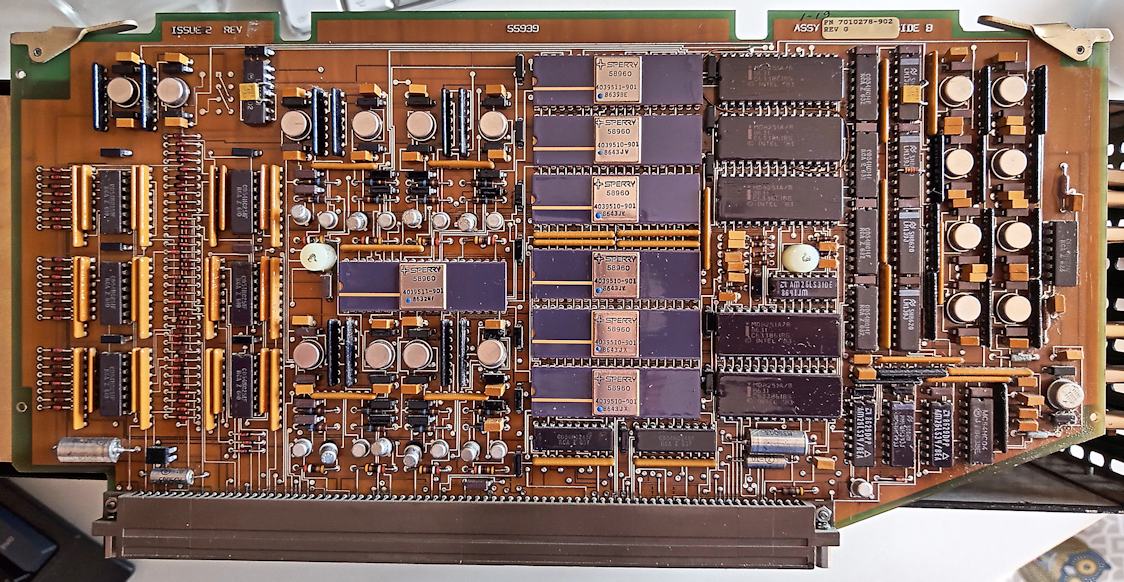
Scheda di I/O con ASIC Sperry.
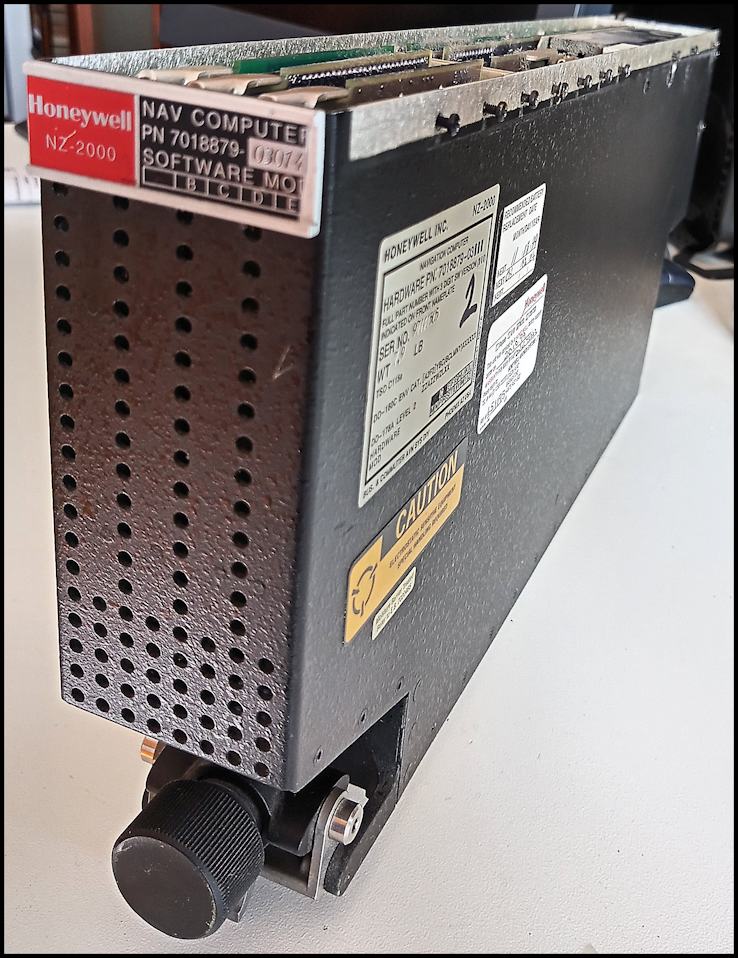
Computer di navigazione Honeywell NZ-2000 (1997).
Scheda processore con CPU Intel Pentium MMX a 166 MHz e chipset TX.
Scheda di I/O con processore Intel 80C186 a 10 MHz e vari ASIC AMI e VLSI.
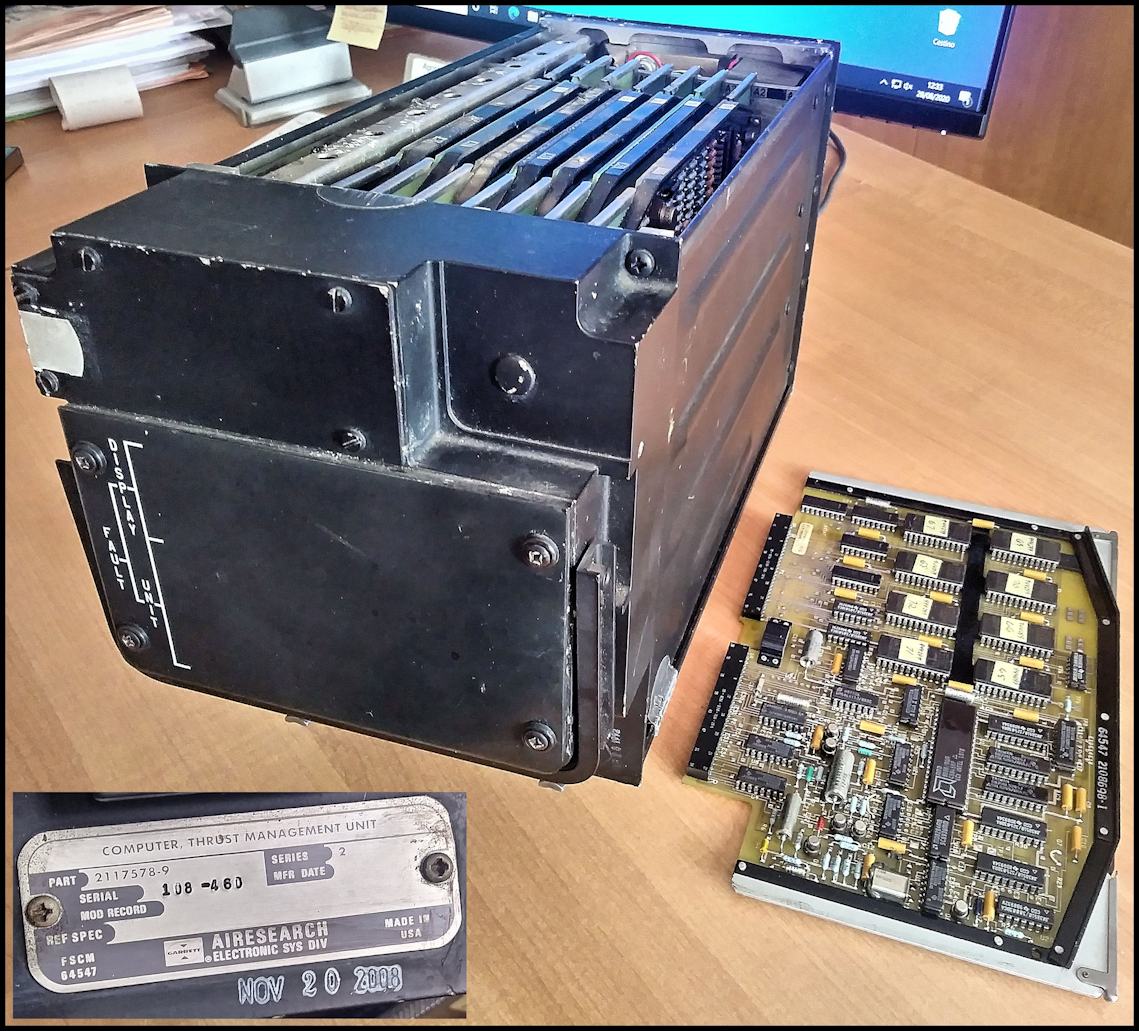
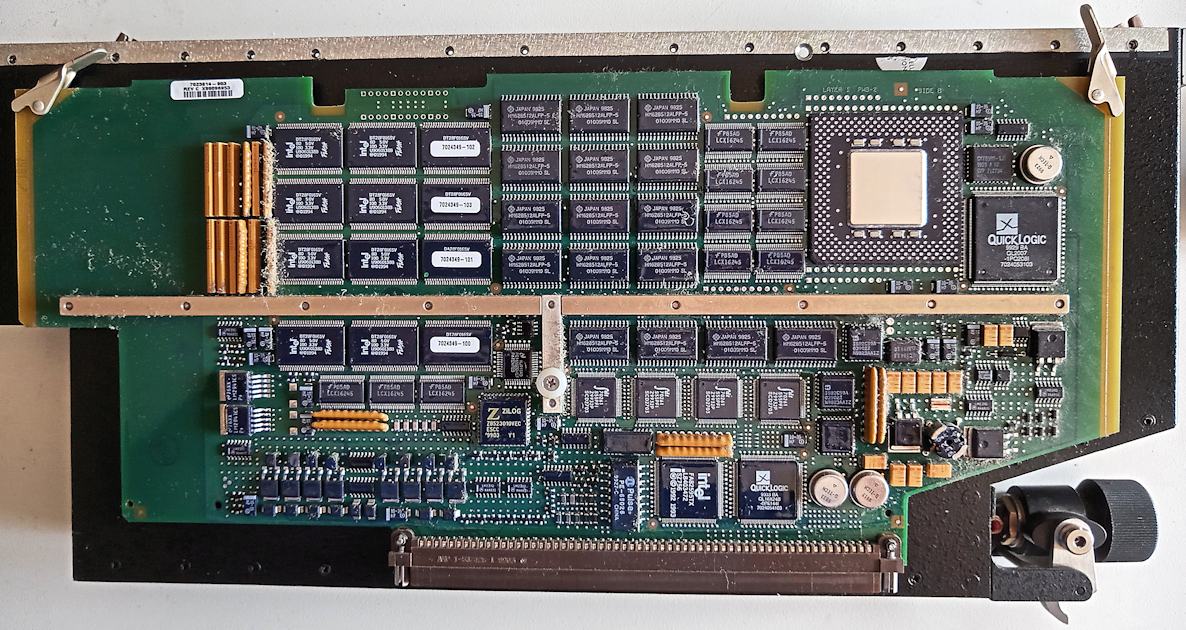
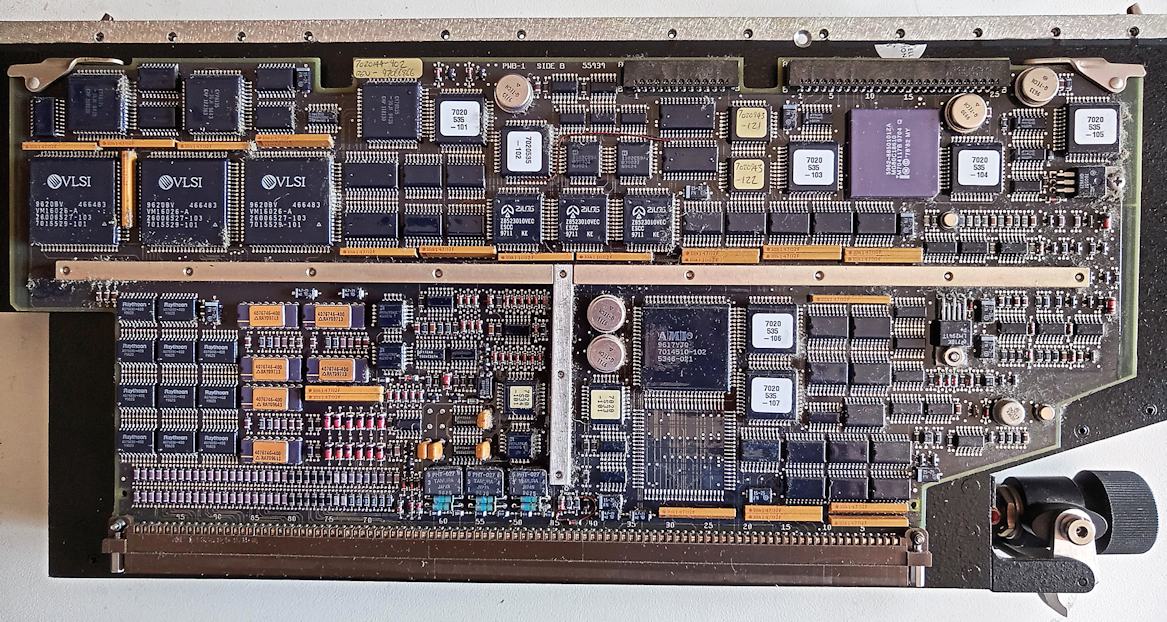
Thrust Management Computer della Garrett Airesearch per aerei commerciali multi-jet, con etichetta KLM (1983, ultima revisione valida fino al Novembre 2008). Contiene una CPU Intel 8086 a 6 MHz.
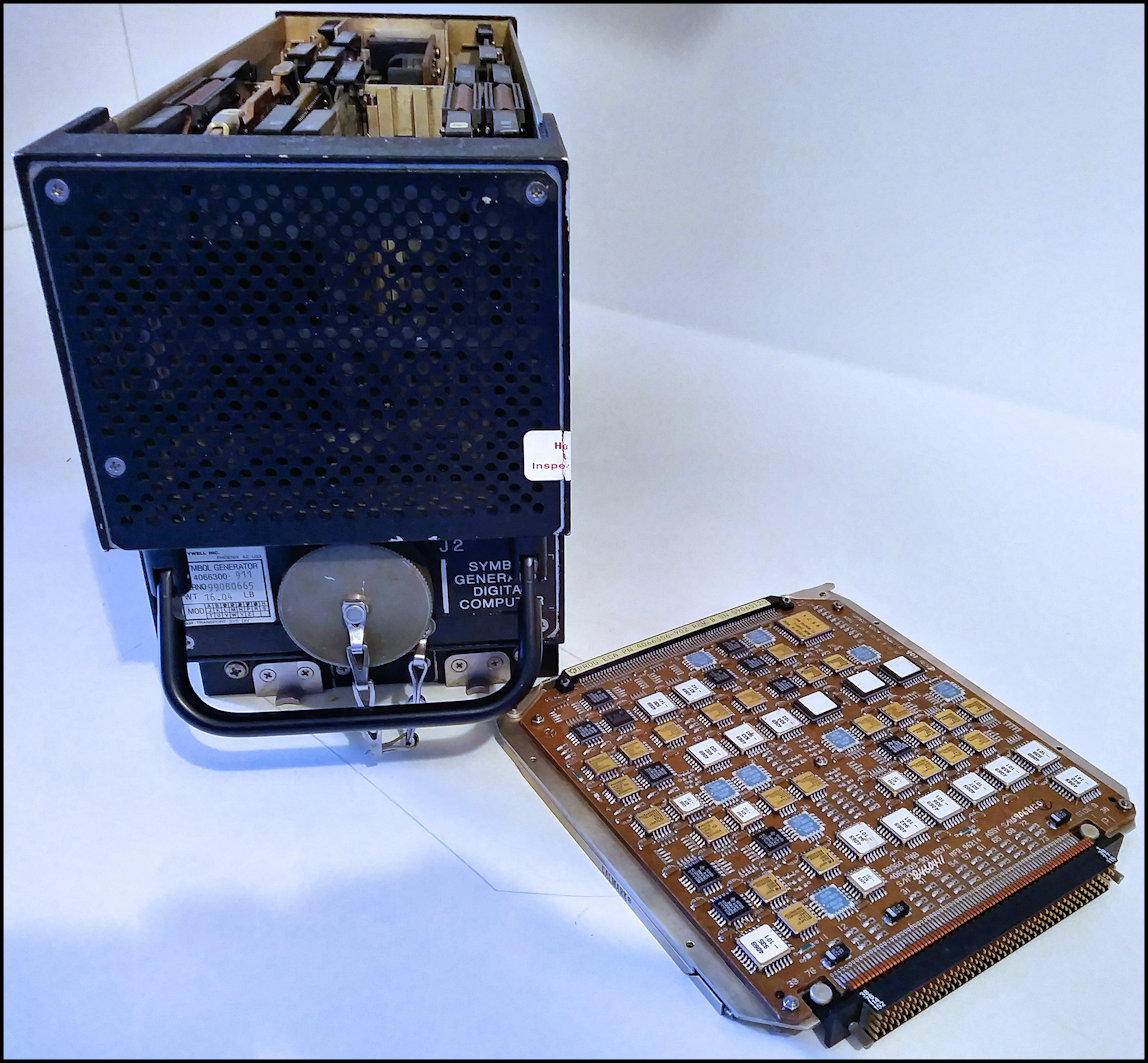
Symbol Generator Honeywell (circa 1989). Si tratta di un componente essenziale dei "glass cockpit" dei moderni aeroplani, in cui la classica strumentazione analogica è sostituita da strumenti rappresentati su monitor. Questo esemplare proviene da un Boeing 737.
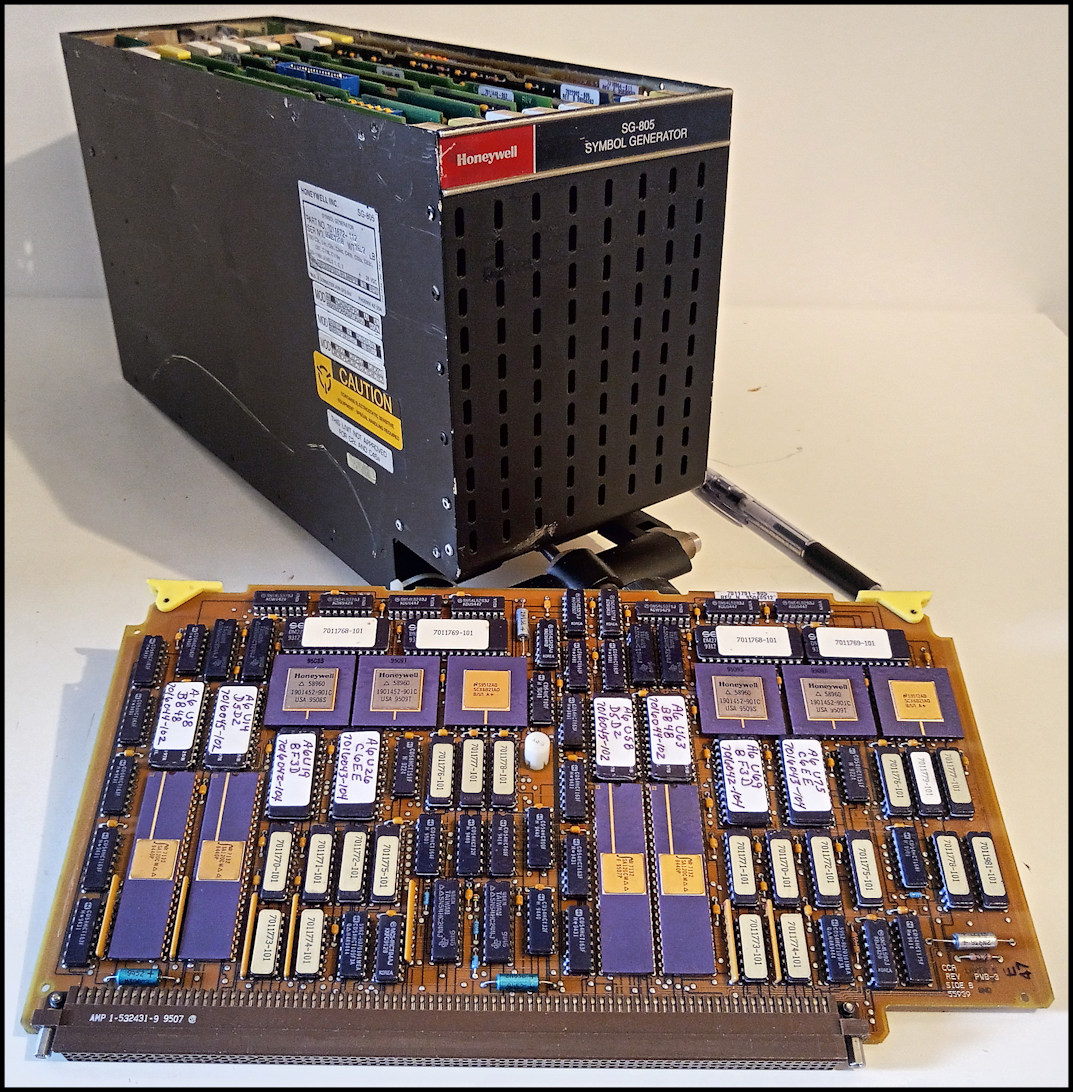
Symbol Generator Honeywell SG-805 (1988).
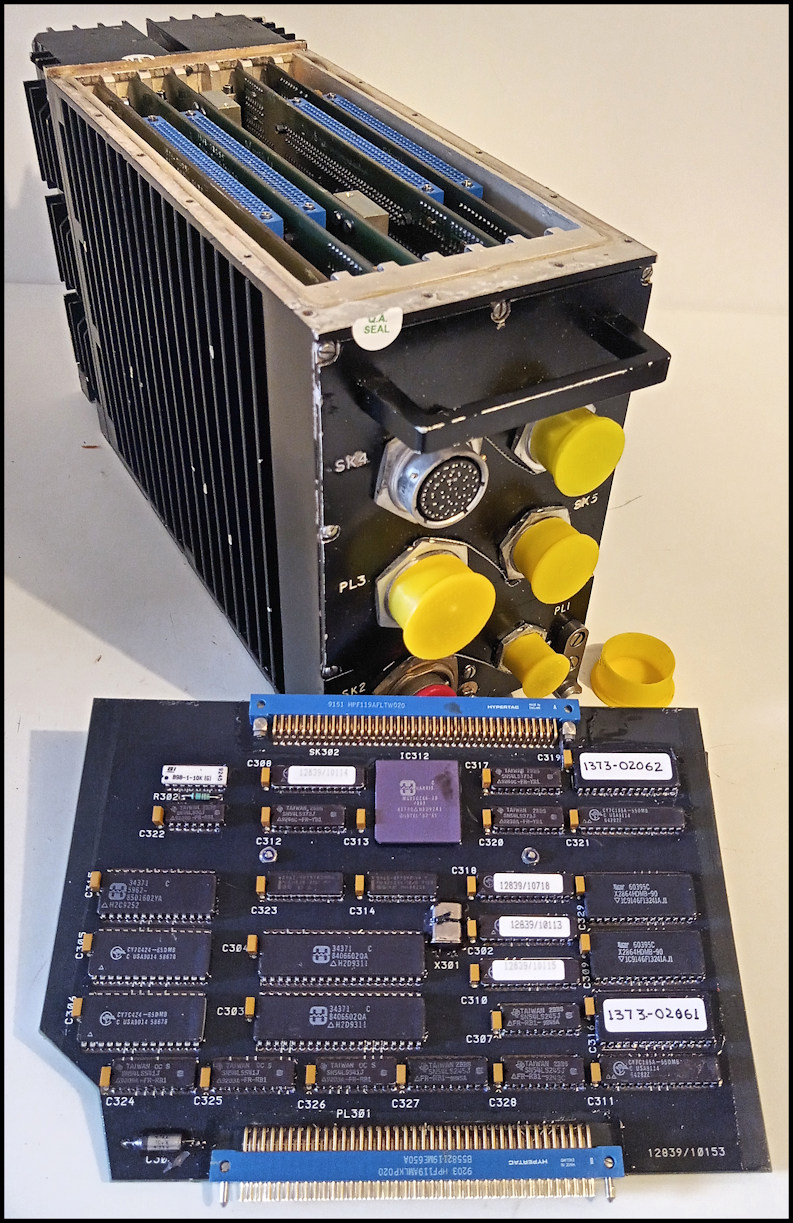
Signal Processor Unit SELEX S&AS (oggi Leonardo Finmeccanica) K1066, 1991/2, montato su aerei militari NATO come elemento centrale dell'apparato di identificazione radar IFF (Identification Friend or Foe). Impiega una CPU Harris 80286 a 16 MHz.

Central Maintenance Computer CMC-7000 di Rockwell/Collins (1988), con etichette Northwest Airlines. E' un apparato specializzato nel monitoraggio continuo, in tempo reale, dei parametri di funzionamento dei motori di aerei commerciali quali il Boeing 747 ed il 767. L'architettura di sistema è ridondante, fault-tolerant, basata su 2 schede processore identiche con CPU 68000 a 10 MHz, fabbricate da Rockwell come second source di Motorola. Tutti i componenti principali hanno specifiche "militari" anche se destinati in questo caso ad un'applicazione civile.
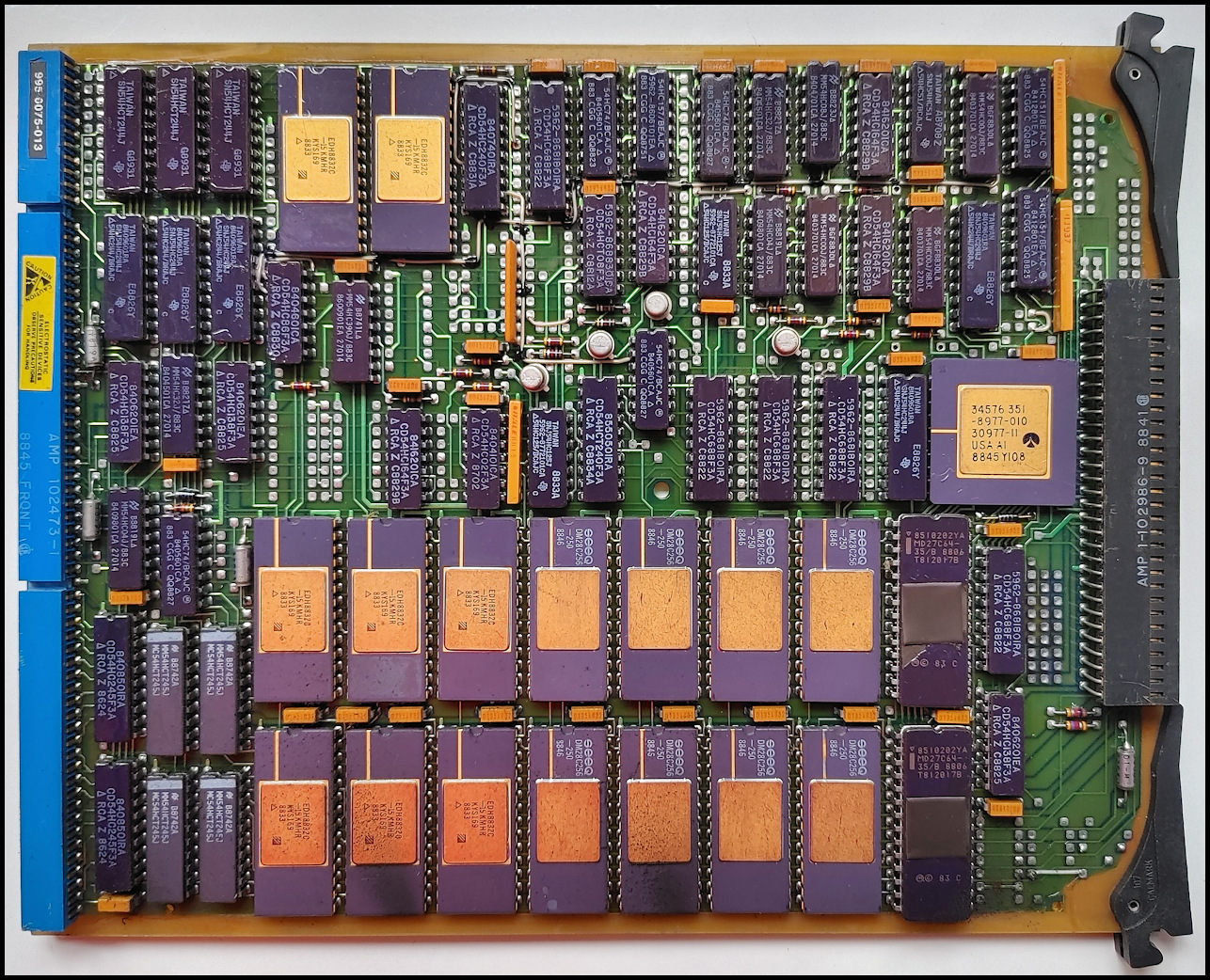
Una delle 2 schede processore/memoria.